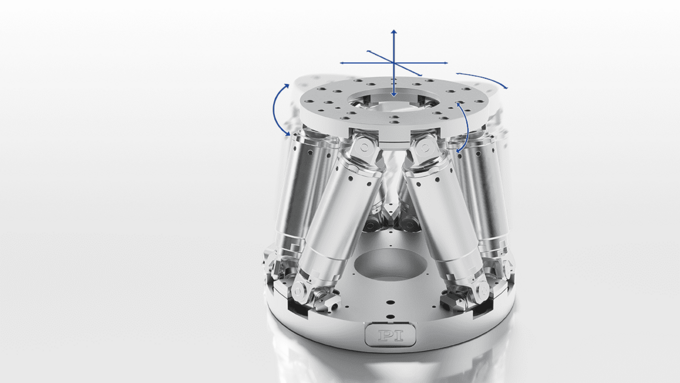
Un hexapode est une plateforme de mouvement à architecture parallèle qui déplace, positionne et aligne des charges selon six degrés de liberté : trois linéaires X, Y, Z et trois rotatifs ΘX, ΘY, ΘZ. Le design typique d'un hexapode, également connu sous le nom de plateforme Stewart, se compose de six actionneurs réglables en longueur reliés à l'embase par des joints de cardan, ainsi que d'une plateforme de mouvement qui supporte la charge. Grâce à leur architecture parallèle, les hexapodes peuvent exécuter des profils de mouvement multi-axes complexes avec une répétabilité, une dynamique et une stabilité élevées, tout en restant très compacts.
Les hexapodes de précision PI bénéficient de plus de trois décennies d'expérience en matière de design et de fabrication. Grâce à un vaste choix de capteurs, logiciels et contrôleurs de mouvement appropriés, notre gamme de technologies d'entraînement, du piézoélectrique à l'électromagnétique permet de proposer des hexapodes adaptés à de nombreuses exigences et situations d'installation.

Grâce à des contrôleurs et des logiciels puissants et intuitifs, les hexapodes sont faciles à contrôler. Le point de pivot ajustable par l'utilisateur offre également une flexibilité d'application maximale.
Nos hexapodes sont disponibles en différentes tailles et configurations et couvrent une grande variété d'applications allant du positionnement d'échantillon à l'alignement actif de fibres et éléments optiques, en passant par l'assemblage automatisé.
Découvrez notre large gamme d'hexapodes de précision pour des charges allant de 1 kg à 250 kg en version standard et une répétabilité allant jusqu'à ±0,06 µm. Des hexapodes de précision personnalisés peuvent même supporter des charges de plus de 2 000 kg.


Les mini hexapodes de précision PI offrent un équilibre parfait entre taille, capacité de charge et performance. Ces hexapodes ultra-compacts sont parfaits pour des applications telles que le positionnement d'outils ou de pièces lors du micro-assemblage, l'alignement de fibres optiques dans la photonique au silicium ou la simulation de mouvements lors de tests fonctionnels. Des versions compatibles vide jusqu'à 10-6 hPa sont également disponibles.








Les hexapodes de taille intermédiaire PI sont proposés dans de nombreuses versions pour satisfaire aux exigences d'applications les plus diverses. Vous trouverez des hexapodes dynamiques dédiés à la simulation de mouvements, des systèmes haute répétabilité pour un alignement ultra précis, ou encore des hexapodes avec actionneurs à faible encombrement pour une hauteur réduite et permettant de positionner des charges moyennes.




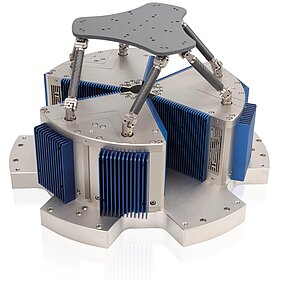


Les hexapodes robustes de PI positionnent les charges lourdes de manière sûre et précise, quel que soit l'orientation ou la situation d'installation. Cela est possible grâce à des joints universels spéciaux un choix de composants particulièrement rigides et sans jeu mécanique. Les applications possibles vont du mouvement de composants lourds au positionnement d'outils d'inspection dans l'industrie et la recherche, en passant par l'alignement de réflecteurs dans les télescopes.



PI bénéficie de nombreuses années d'expérience dans la technique du vide et présente une forte intégration verticale. PI est donc la société idéale pour proposer des hexapodes standards et sur mesure adaptés aux exigences des applications sous vide. La sélection de composants et de matériaux appropriés, des designs et accessoires parfaitement adaptés, ainsi que des procédés de fabrication et de contrôles maitrisés contribuent à la qualité de nos systèmes.
Des hexapodes standards sont disponibles pour des environnements sous vide allant jusqu'à 10-6 hPa. Des hexapodes sur mesure peuvent être conçus pour des classes de vide plus sévères.



Contrôleur, logiciel et intégration
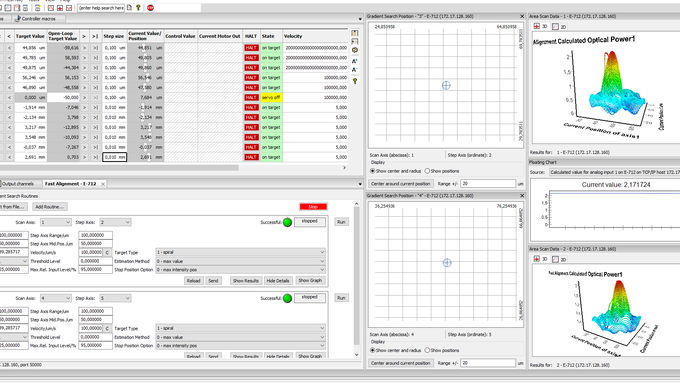
Le contrôleur d'hexapode permet un contrôle simple et intuitif des systèmes à architecture parallèle : toutes les positions cibles peuvent être commandées sous la forme de coordonnées cartésiennes. Le contrôleur réalise les calculs nécessaires à la commande de chaque actionneur et au mouvement souhaité de la plateforme.
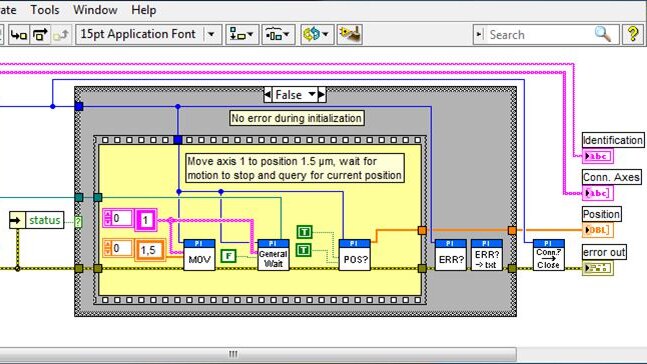
La position et l'alignement du repère de référence et du centre de rotation peuvent être facilement définis dans le logiciel et adaptés à l'application. L'interface utilisateur graphique universelle de PI peut être utilisée pour contrôler et démarrer non seulement tous les systèmes hexapodes, mais aussi tous les autres systèmes de positionnement de PI avec n'importe quelle technologie d'entraînement. Le pack logiciel complet PI Software Suite propose également des pilotes et bibliothèques pour les langages de programmation couramment utilisés.
L'émulation du contrôleur en tant que machine virtuelle facilite l'intégration dans votre programme avant même le déploiement de l'hexapode. Cela vous permet de développer, tester et optimiser vos propres programmes et d'intégrer l'hexapode dans l'environnement de production avant même d'avoir reçu le système.
Le programme de simulation de cinématiques parallèles permet de calculer et de représenter l'espace de travail et les situations de charge et simplifie la mise en œuvre. Une interface EtherCAT® est également disponible en option pour l'intégration dans des procédés d'automatisme industriel.