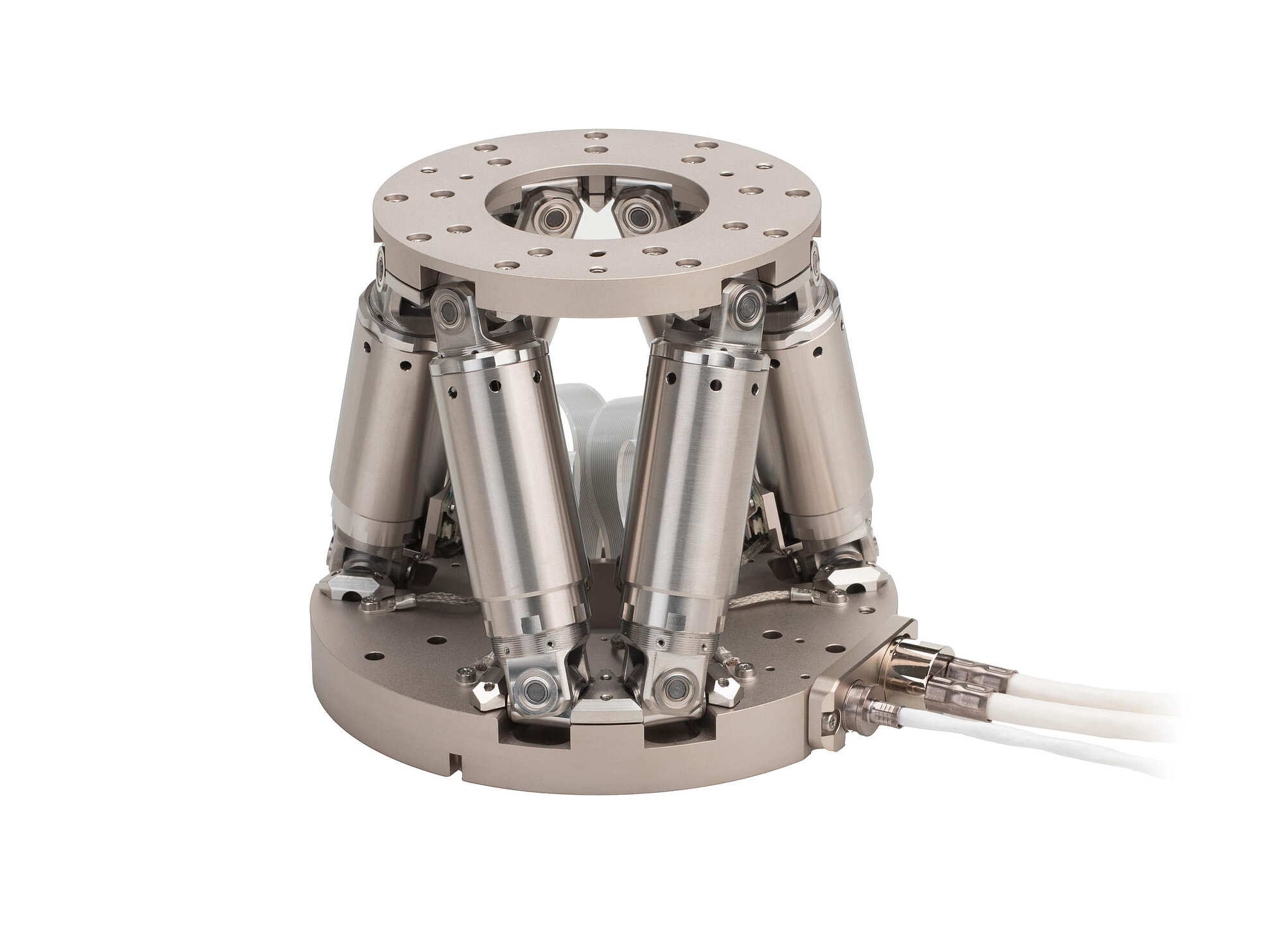
The cables fixed to the H-811.I2V are not drag chain compatible.
Note on outer diameter data transmission cable: The data transmission connection consists of 2 cables that end in one connector. The specified diameter applies for each cable.
Air-side connecting cables are not included in the scope of delivery and must be ordered separately.
With continuous operation in a vacuum, heat generation may necessitate limiting the operating parameters.
When measuring position specifications, typical velocity is used. The data is included in the delivery of the product in the form of a measurement report and is stored at PI.
The maximum travel ranges of the individual coordinates (X, Y, Z, θX, θY, θZ) are interdependent. The data for each axis shows its maximum travel range when all other axes are in the zero position of the nominal travel range and the default coordinate system is in use, or rather when the pivot point is set to 0,0,0.
At PI, technical data is specified at 22 ±3 °C. Unless otherwise stated, the values are for unloaded conditions. Some properties are interdependent. The designation "typ." indicates a statistical average for a property; it does not indicate a guaranteed value for every product supplied. During the final inspection of a product, only selected properties are analyzed, not all. Please note that some product characteristics may deteriorate with increasing operating time.