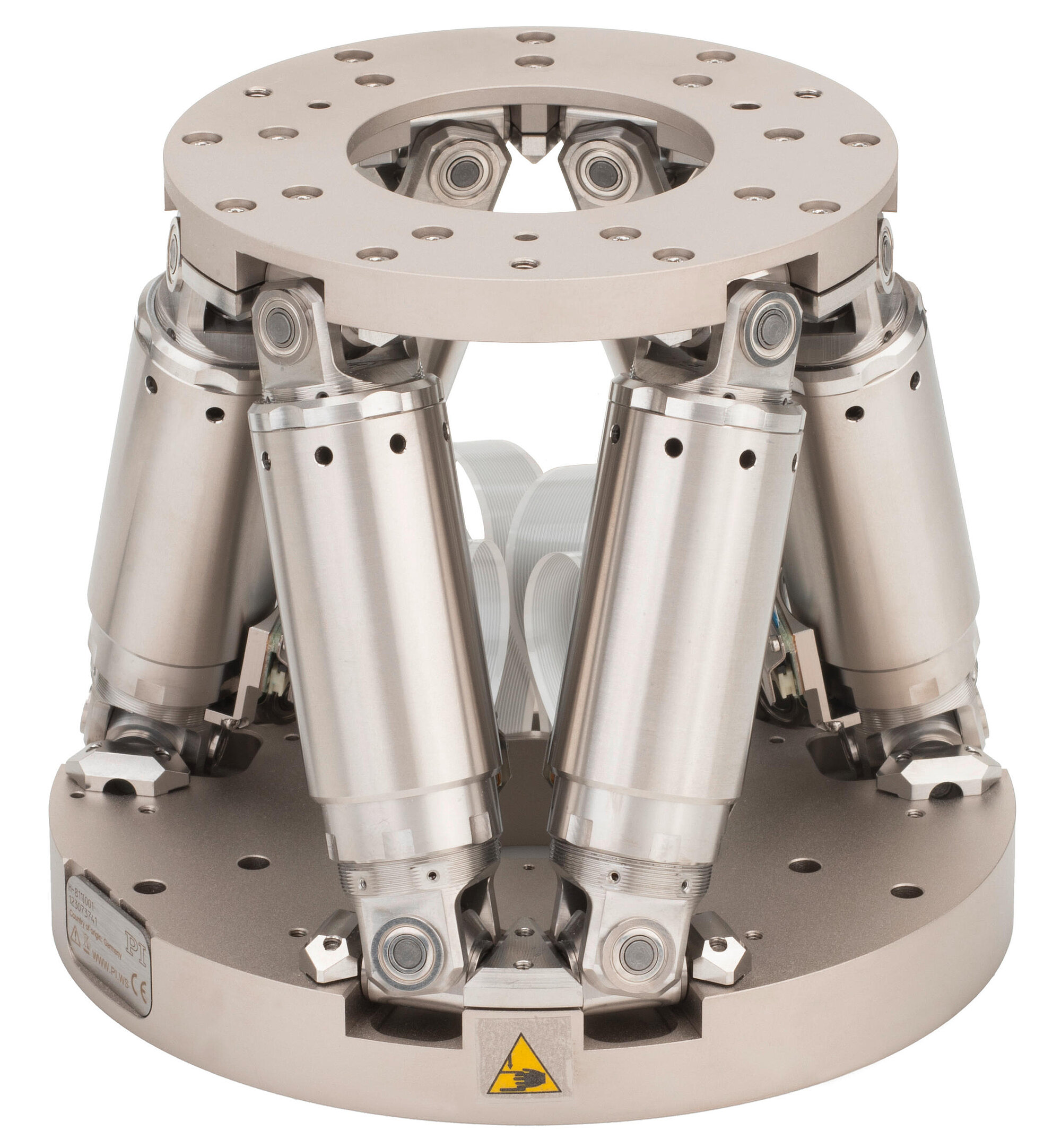
H-811.S2
Miniature hexapod for highly dynamic applications; BLDC motor; 2.5 kg payload; 25 mm/s maximum velocity; 0.5 m cable length. Connecting cables are not included in the scope of delivery and must be ordered separately.

Dynamic working range of the H-811.S2, X, 2.5 kg
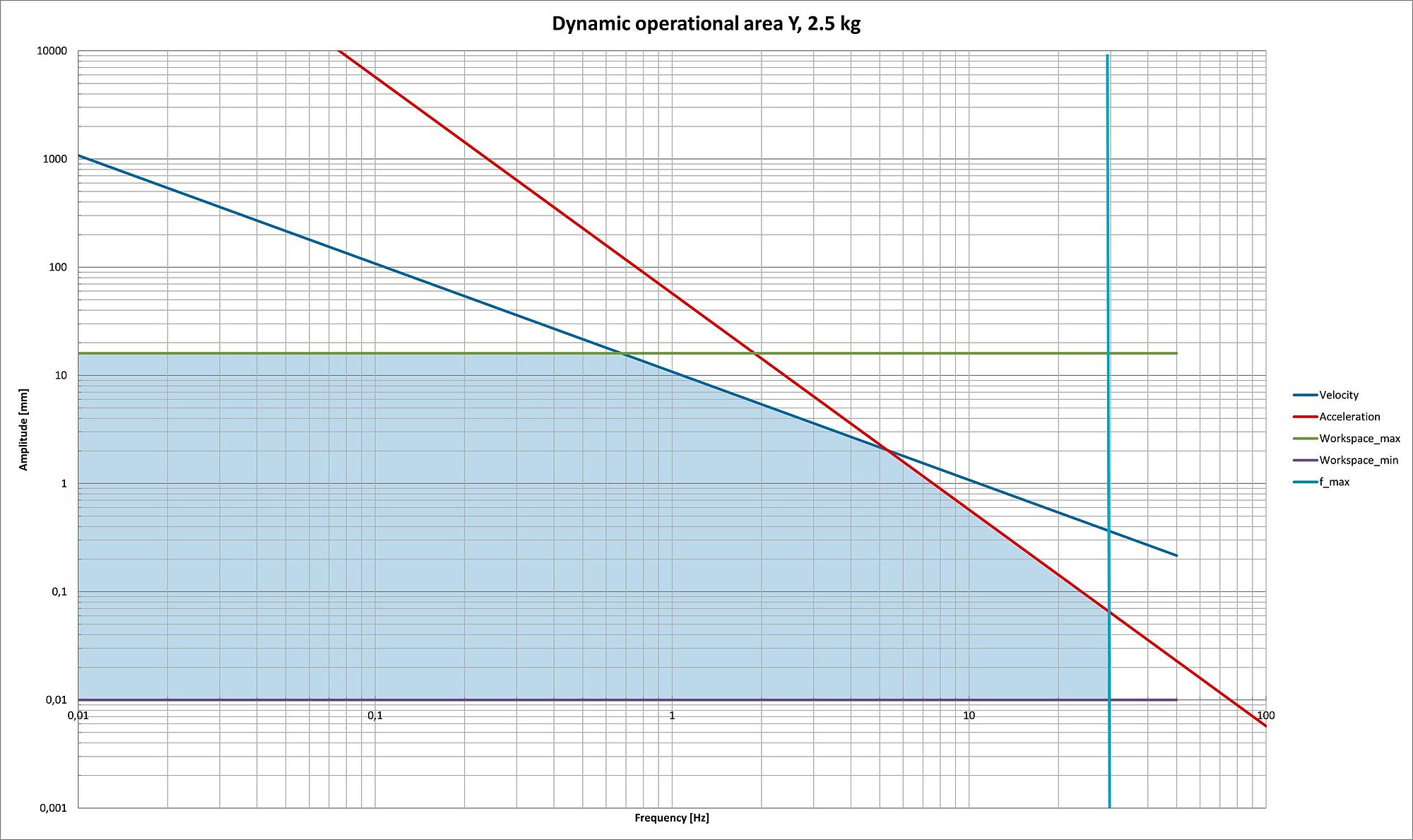
Dynamic working range of the H-811.S2, Y, 2.5 kg
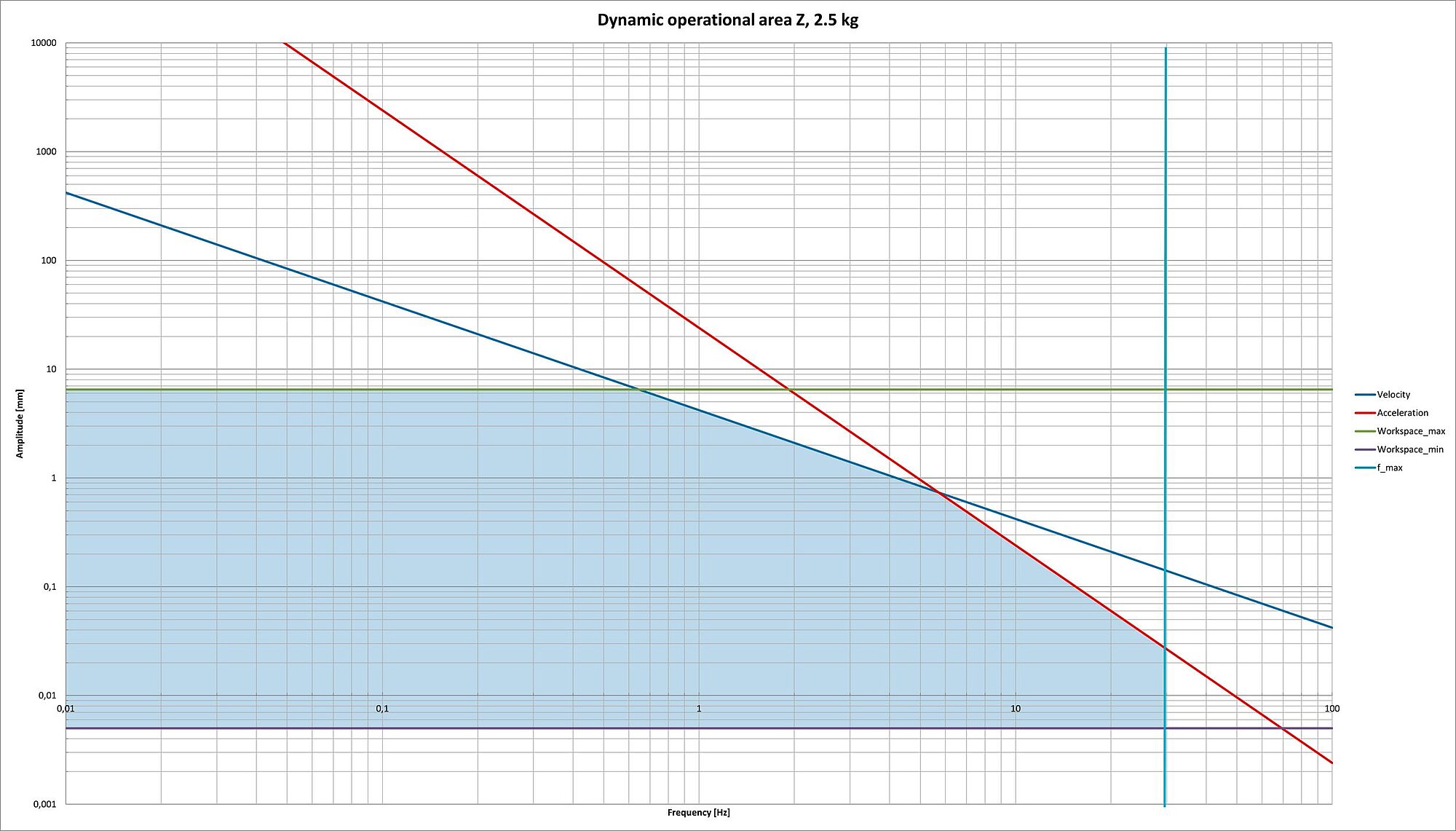
Dynamic working range of the H-811.S2, Z, 2.5 kg
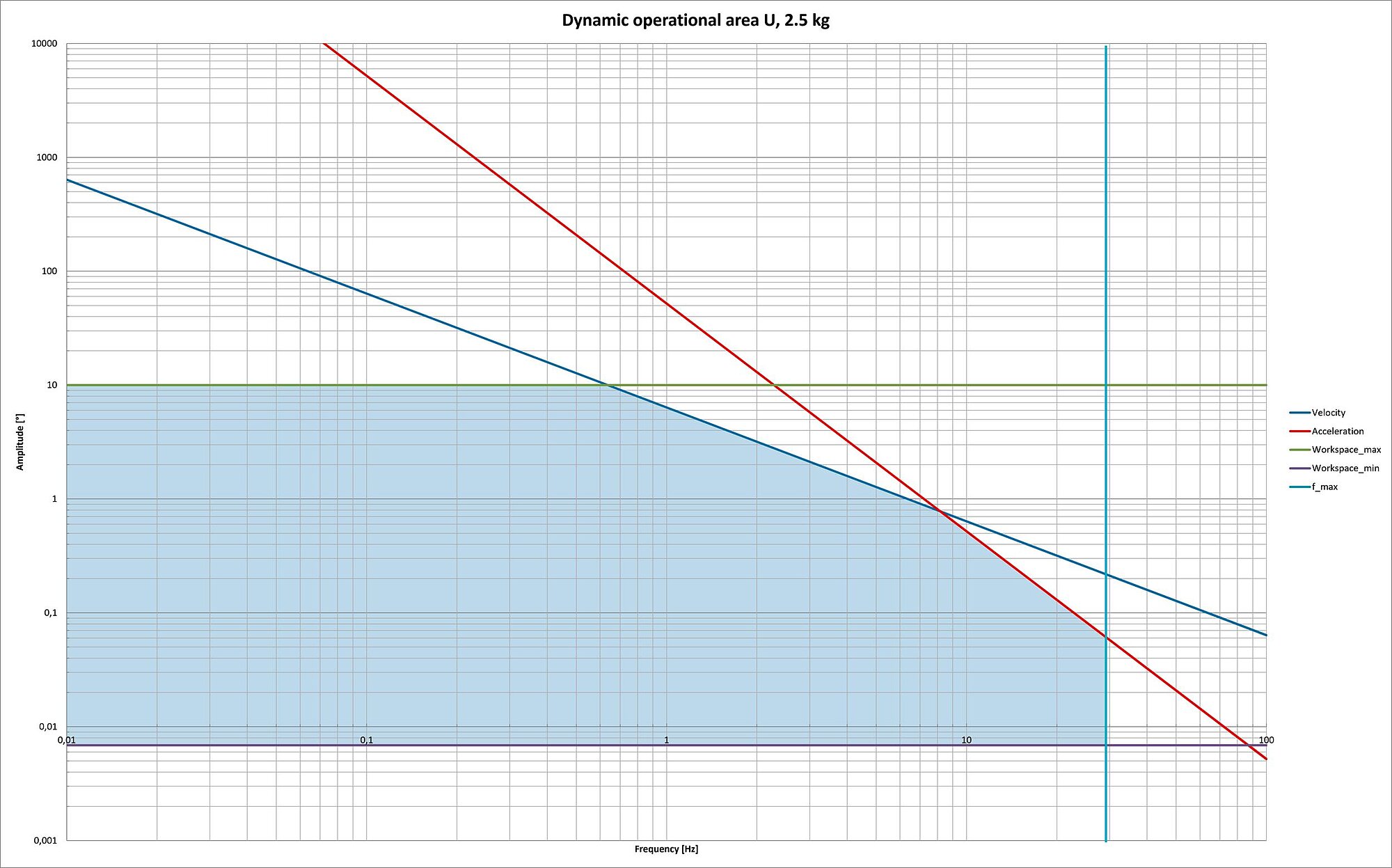
Dynamic working range of the H-811.S2, U (ƟX), 2.5 kg
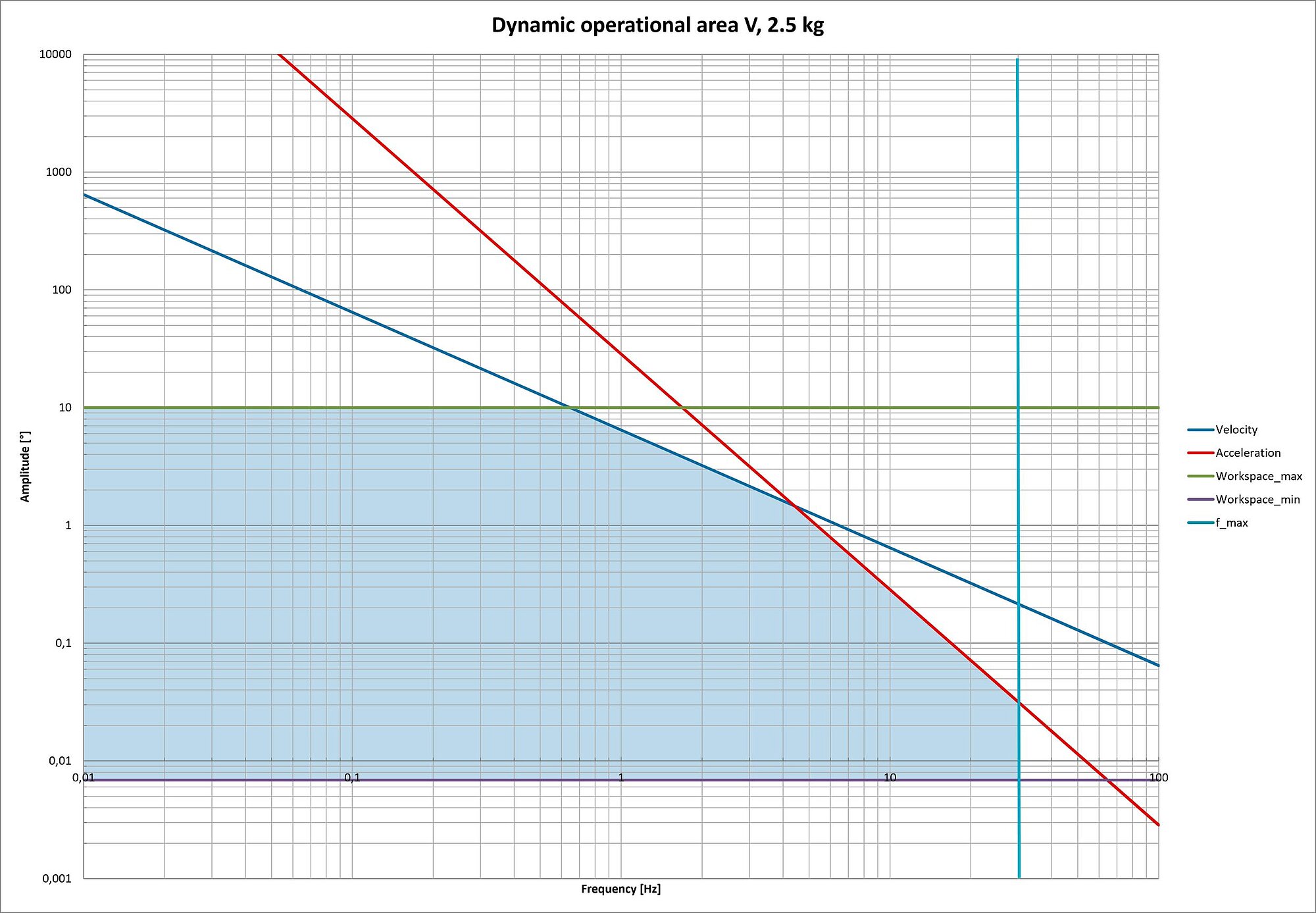
Dynamic working range of the H-811.S2, V (ƟY), 2.5 kg
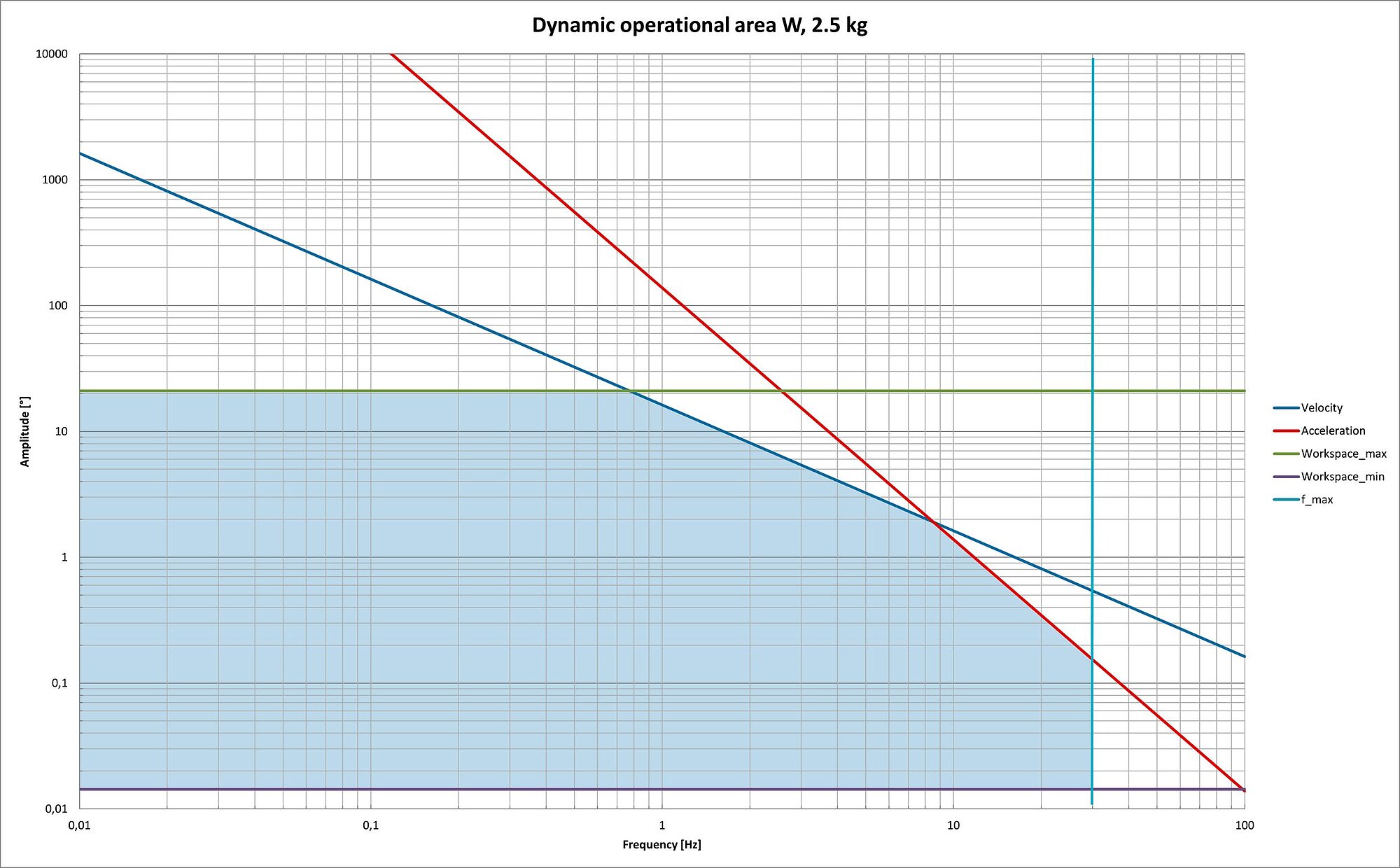
Dynamic working range of the H-811.S2, W (ƟZ), 2.5 kg
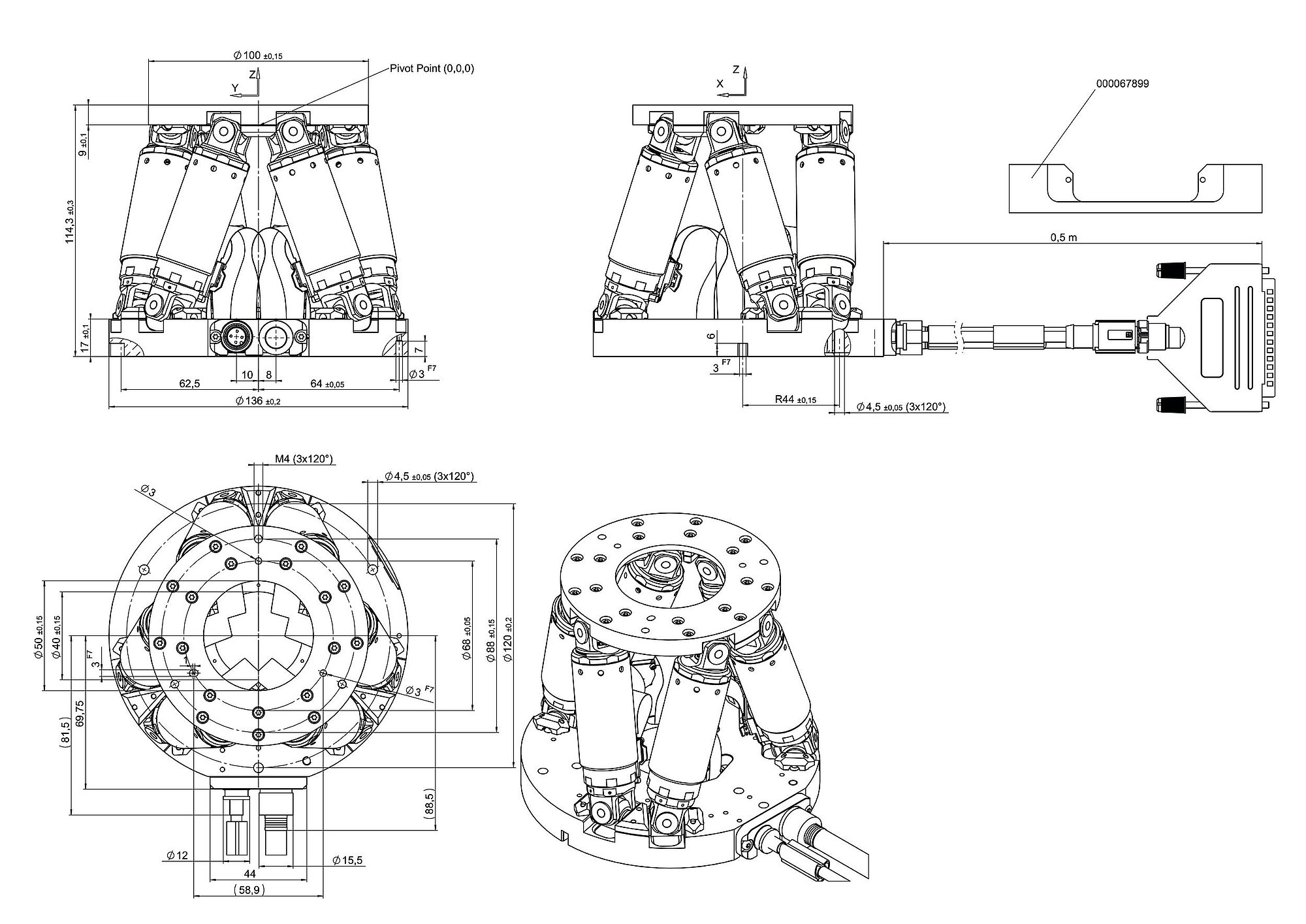
H-811.S2, dimensions in mm, at zero position of nominal travel range. Note that a comma is used in the drawings instead of a decimal point.
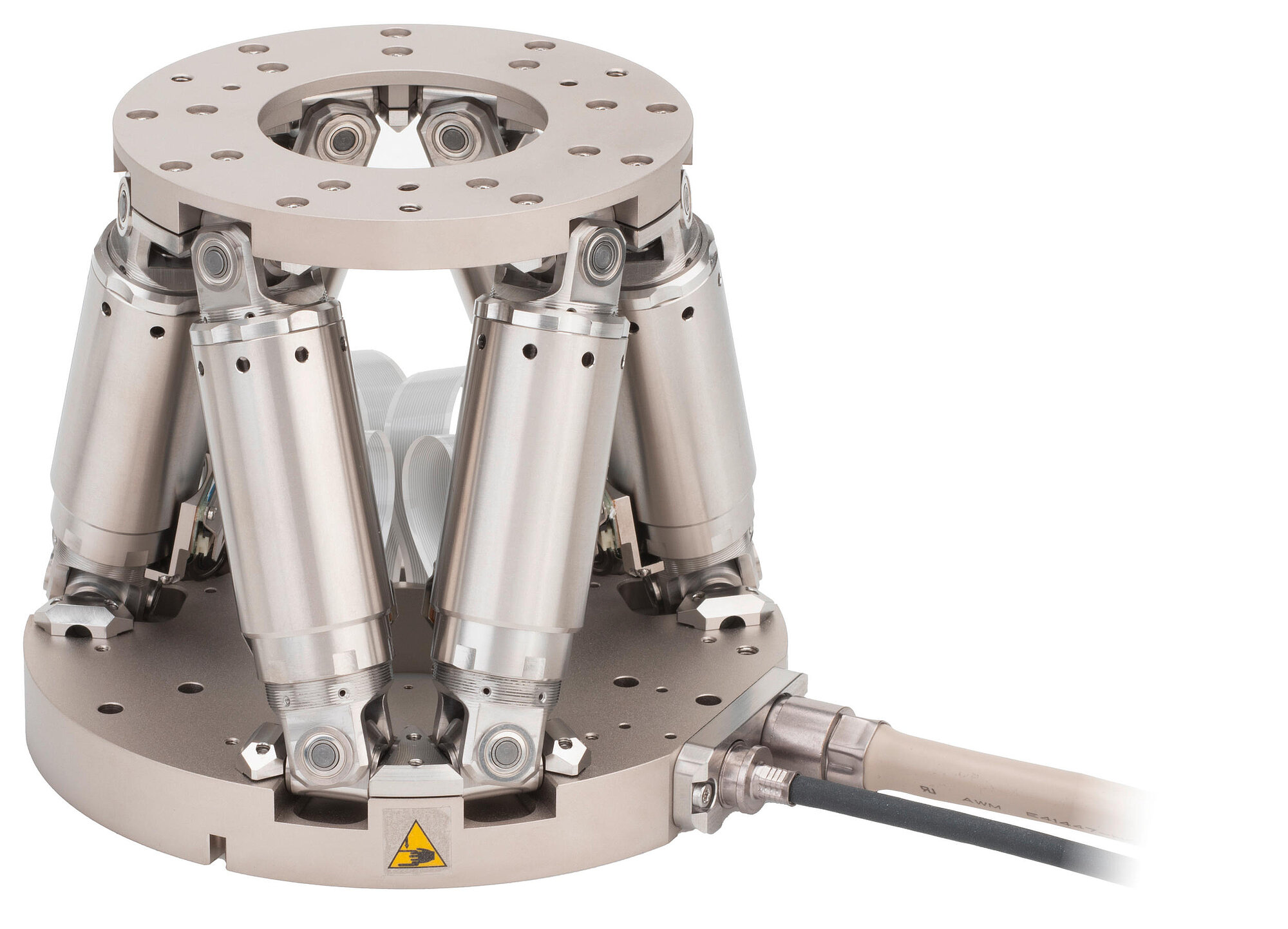
View of H-811.I2 with cable outlet
The hexapod positioning system with the C-887 hexapod controller has been certified by CIPA standards (Camera & Imaging Products Association) for image testing and camera qualification applications.









Application fields
With its high dynamic properties, the 811.S2 is especially suitable for motion simulations, e.g., for testing image stabilization in cameras or mobile devices. Thanks to its small footprint and its proven reliability in applications with high numbers of cycles, the H-811 is typically employed in precision assembly and metrology. In such areas, it makes a significant contribution to boosting the productivity of complex manufacturing processes and measuring procedures.
High dynamics combined with extreme reliability
The parallel-kinematic arrangement enables the hexapod to perform motion in 6 axes in an extremely compact design. Thanks to the use of brushless DC motors and its stiff mechanical design, the H-811 offers the dynamics required for active alignment applications, even if external interference (e.g., in the case of gluing processes) occurs. Extensive software tools provide support by simplifying the system tuning and making automatic routines available for alignment to an external analog control signal.
Motion simulation for protecting the overall system
The PIVirtualMove software, which can be downloaded free of charge, simulates the travel range, the alignment, and the permissible forces and torques of the H-811 to facilitate an optimum system configuration. In this context, both the chosen center of rotation and the center of gravity of the load are taken into consideration.
Work and tool coordinate systems and an emulation tool are included in the free software package belonging to the scope of delivery of the hexapod controller. The tools provided help to protect critical components such as optical or photonic parts.
| Motion | H-811.S2 | Tolerance |
|---|---|---|
| Active axes | X ǀ Y ǀ Z ǀ θX ǀ θY ǀ θZ | |
| Travel range in X | ± 17 mm | |
| Travel range in Y | ± 16 mm | |
| Travel range in Z | ± 6.5 mm | |
| Rotation range in θX | ± 10 ° | |
| Rotation range in θY | ± 10 ° | |
| Rotation range in θZ | ± 21 ° | |
| Maximum velocity in X | 25 mm/s | |
| Recommended velocity in X | 10 mm/s | |
| Maximum velocity in Y | 25 mm/s | |
| Recommended velocity in Y | 10 mm/s | |
| Maximum velocity in Z | 25 mm/s | |
| Recommended velocity in Z | 10 mm/s | |
| Maximum angular velocity in θX | 625 mrad/s | |
| Recommended angular velocity in θX | 250 mrad/s | |
| Maximum angular velocity in θY | 625 mrad/s | |
| Recommended angular velocity in θY | 250 mrad/s | |
| Maximum angular velocity in θZ | 625 mrad/s | |
| Recommended angular velocity in θZ | 250 mrad/s | |
| Amplitude-frequency product in X | 11.99 mm·Hz | |
| Amplitude-frequency product in Y | 10.88 mm·Hz | |
| Amplitude-frequency product in Z | 4.2 mm·Hz | |
| Amplitude-frequency product in θX | 6.36 °·Hz | |
| Amplitude-frequency product in θY | 6.45 °·Hz | |
| Amplitude-frequency product in θZ | 16.23 °·Hz | |
| Amplitude-frequency² product in X | 72 mm·Hz² | |
| Amplitude-frequency² product in Y | 57.3 mm·Hz² | |
| Amplitude-frequency² product in Z | 24 mm·Hz² | |
| Amplitude-frequency² product in θX | 52 °·Hz² | |
| Amplitude-frequency² product in θY | 28.5 °·Hz² | |
| Amplitude-frequency² product in θZ | 138.5 °·Hz² | |
| Amplitude error | 10 % | max. |
| Phase error | 60 ° | max. |
| Maximum frequency | 30 Hz | |
| Positioning | H-811.S2 | Tolerance |
| Minimum incremental motion in X | 1 µm | typ. |
| Minimum incremental motion in Y | 1 µm | typ. |
| Minimum incremental motion in Z | 0.5 µm | typ. |
| Minimum incremental motion in θX | 12 µrad | typ. |
| Minimum incremental motion in θY | 12 µrad | typ. |
| Minimum incremental motion in θZ | 25 µrad | typ. |
| Unidirectional repeatability in X | ± 0.5 µm | typ. |
| Unidirectional repeatability in Y | ± 0.5 µm | typ. |
| Unidirectional repeatability in Z | ± 0.2 µm | typ. |
| Unidirectional repeatability in θX | ± 6 µrad | typ. |
| Unidirectional repeatability in θY | ± 6 µrad | typ. |
| Unidirectional repeatability in θZ | ± 10 µrad | typ. |
| Backlash in X | 0.5 µm | typ. |
| Backlash in Y | 0.5 µm | typ. |
| Backlash in Z | 0.15 µm | typ. |
| Backlash in θX | 5 µrad | typ. |
| Backlash in θY | 5 µrad | typ. |
| Backlash in θZ | 10 µrad | typ. |
| Integrated sensor | Incremental rotary encoder | |
| Drive properties | H-811.S2 | Tolerance |
| Drive type | Brushless DC motor | |
| Mechanical properties | H-811.S2 | Tolerance |
| Stiffness in X | 0.7 N/µm | |
| Stiffness in Y | 0.7 N/µm | |
| Stiffness in Z | 8 N/µm | |
| Maximum load capacity, base plate horizontal | 2.5 kg | |
| Maximum load capacity, base plate in any orientation | 0.9 kg | |
| Maximum holding force, base plate horizontal | 15 N | |
| Maximum holding force, base plate in any orientation | 2.5 N | |
| Overall mass | 2.2 kg | |
| Material | Stainless steel, aluminum | |
| Miscellaneous | H-811.S2 | Tolerance |
| Operating temperature range | 0 to 50 °C | |
| Connector for data transmission | HD D-sub 78 (m) | |
| Connector for supply voltage | M12 4-pole (m) | |
| Cable length | 0.5 m | |
| Outer diameter power supply cable | 4.95 mm | |
| Minimum bending radius for fixed installation, power supply | 25 mm | |
| Outer diameter data transmission cable | 9.5 mm | |
| Minimum bending radius for fixed installation, data transmission | 95 mm | |
| Recommended controllers/drivers | C-887.5x |
The cables fixed to the H-811.S2 are 0.5 m long respectively.
The cables fixed to the H-811.S2 are not drag chain compatible.
Connecting cables are not included in the scope of delivery and must be ordered separately.
When measuring position specifications, typical velocity is used. The data is included in the delivery of the product in the form of a measurement report and is stored at PI.
The maximum travel ranges of the individual coordinates (X, Y, Z, θX, θY, θZ) are interdependent. The data for each axis shows its maximum travel range when all other axes are in the zero position of the nominal travel range and the default coordinate system is in use, or rather when the pivot point is set to 0,0,0.
At PI, technical data is specified at 22 ±3 °C. Unless otherwise stated, the values are for unloaded conditions. Some properties are interdependent. The designation "typ." indicates a statistical average for a property; it does not indicate a guaranteed value for every product supplied. During the final inspection of a product, only selected properties are analyzed, not all. Please note that some product characteristics may deteriorate with increasing operating time.
Hexapod Systems: Hexapod H-8x with C-887.5x Controller
H-811 Miniature Hexapods
Technical note for unpacking the hexapod
Certification of Registration of Vibratory Apparatus
Ask for a free quote on quantities required, prices, and lead times or describe your desired modification.
Miniature hexapod for highly dynamic applications; BLDC motor; 2.5 kg payload; 25 mm/s maximum velocity; 0.5 m cable length. Connecting cables are not included in the scope of delivery and must be ordered separately.
Quickly receive an answer to your question by email or phone from a local PI sales engineer.








