L-741.131100
Precision XY stage; 2-phase stepper motor; 305 mm × 305 mm travel range (X × Y); 200 N load capacity; 45 mm/s × 45 mm/s maximum velocity; ball screw

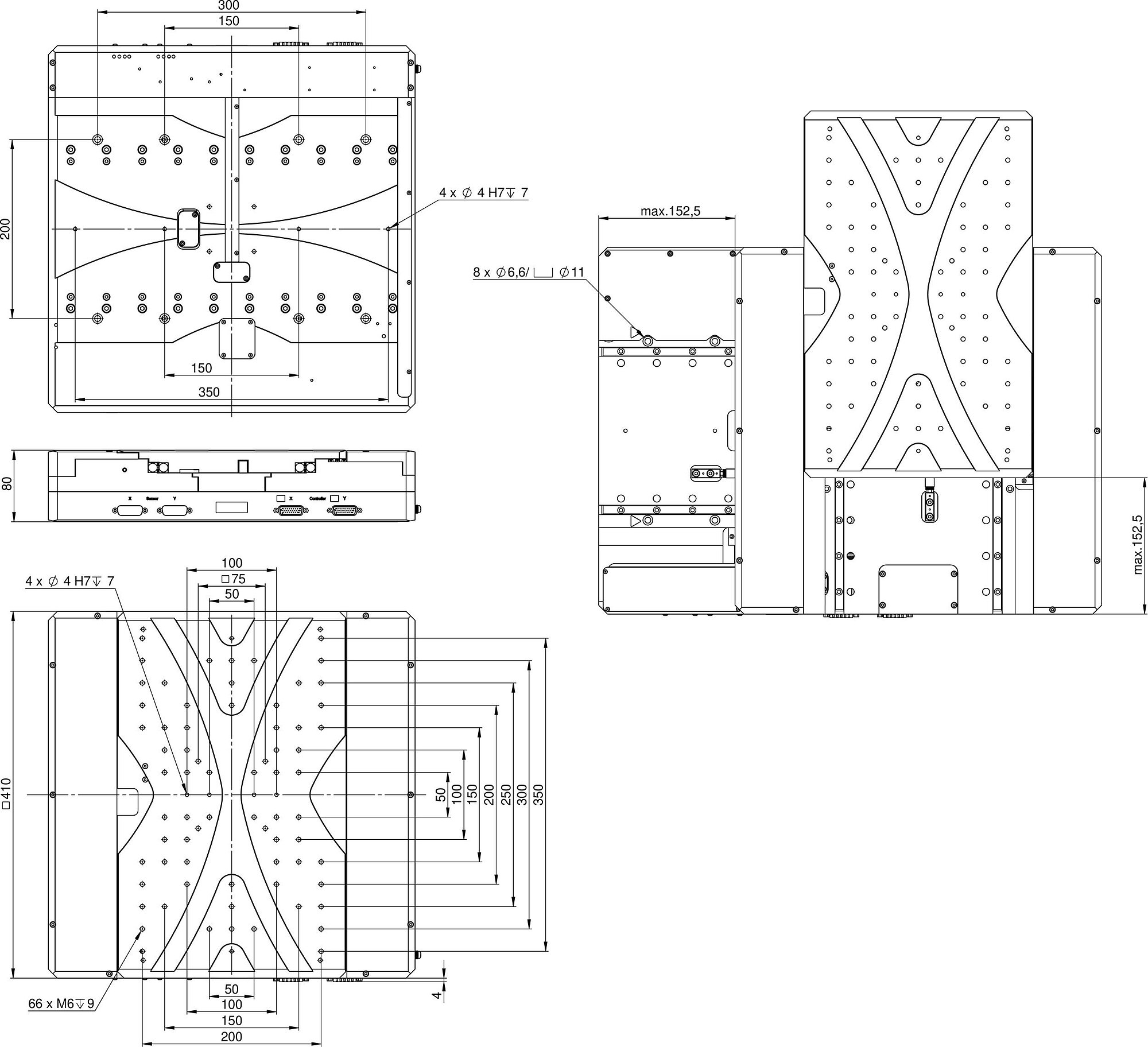
L-741.13x1xx, dimensions in mm


Highly accurate position measuring with incremental linear encoder
Noncontact optical linear encoders measure the position directly at the platform with the greatest accuracy. Nonlinearity, mechanical play or elastic deformation have no influence on the measurement. Optical limit and reference switches. More travel ranges on request.
Crossed roller guide
With crossed roller guides, the point contact of the balls in ball guides is replaced by line contact of the hardened rollers. Consequently, they are considerably stiffer and need less preload, which reduces friction and allows smoother running. Crossed roller guides are also distinguished by high guide accuracy and load capacity. Force-guided rolling element cages prevent cage creep.
Drive types
Application fields
Medical industry. Laser cutting. Biotechnology. Measuring technology. Laser inscription.
| Motion | L-741.131100 | L-741.131111 | L-741.131112 | L-741.133111 | L-741.133112 | L-741.133132 | Tolerance |
|---|---|---|---|---|---|---|---|
| Active axes | X ǀ Y | X ǀ Y | X ǀ Y | X ǀ Y | X ǀ Y | X ǀ Y | |
| Travel range in X | 305 mm | 305 mm | 305 mm | 305 mm | 305 mm | 305 mm | |
| Travel range in Y | 305 mm | 305 mm | 305 mm | 305 mm | 305 mm | 305 mm | |
| Maximum velocity in X, unloaded | 45 mm/s | 45 mm/s | 45 mm/s | 50 mm/s | 50 mm/s | 90 mm/s | |
| Maximum velocity in Y, unloaded | 45 mm/s | 45 mm/s | 45 mm/s | 50 mm/s | 50 mm/s | 90 mm/s | |
| Orthogonality | ± 96 µrad | ± 96 µrad | ± 96 µrad | ± 96 µrad | ± 96 µrad | ± 96 µrad | typ. |
| Straightness error E_YX (straightness) | ± 4 µm | ± 4 µm | ± 4 µm | ± 4 µm | ± 4 µm | ± 4 µm | typ. |
| Straightness error E_ZX (flatness) | ± 4 µm | ± 4 µm | ± 4 µm | ± 4 µm | ± 4 µm | ± 4 µm | typ. |
| Angular error E_AY (pitch) | ± 75 µrad | ± 75 µrad | ± 75 µrad | ± 75 µrad | ± 75 µrad | ± 75 µrad | typ. |
| Angular error E_BX (pitch) | ± 75 µrad | ± 75 µrad | ± 75 µrad | ± 75 µrad | ± 75 µrad | ± 75 µrad | typ. |
| Angular error E_CX (yaw) | ± 40 µrad | ± 40 µrad | ± 40 µrad | ± 40 µrad | ± 40 µrad | ± 40 µrad | typ. |
| Angular error E_CY (yaw) | ± 40 µrad | ± 40 µrad | ± 40 µrad | ± 40 µrad | ± 40 µrad | ± 40 µrad | typ. |
| Positioning | L-741.131100 | L-741.131111 | L-741.131112 | L-741.133111 | L-741.133112 | L-741.133132 | Tolerance |
| Minimum incremental motion in X | 1 µm | 0.05 µm | 0.05 µm | 0.1 µm | 0.5 µm | 0.8 µm | typ. |
| Minimum incremental motion in Y | 1 µm | 0.05 µm | 0.05 µm | 0.1 µm | 0.5 µm | 0.8 µm | typ. |
| Unidirectional repeatability in X | ± 0.05 µm | ± 0.025 µm | ± 0.025 µm | ± 0.05 µm | ± 0.25 µm | ± 0.4 µm | typ. |
| Unidirectional repeatability in Y | ± 0.05 µm | ± 0.025 µm | ± 0.025 µm | ± 0.05 µm | ± 0.25 µm | ± 0.4 µm | typ. |
| Bidirectional repeatability in X | 5 µm | 1 µm | 1 µm | 1 µm | 1 µm | 5 µm | typ. |
| Bidirectional repeatability in Y | 5 µm | 1 µm | 1 µm | 1 µm | 1 µm | 5 µm | typ. |
| Reference switch | Forked photoelectric sensor, N/C contact, 5 V, NPN | Forked photoelectric sensor, N/C contact, 5 V, NPN | Forked photoelectric sensor, N/C contact, 5 V, NPN | Forked photoelectric sensor, N/C contact, 5 V, NPN | Forked photoelectric sensor, N/C contact, 5 V, NPN | Forked photoelectric sensor, N/C contact, 5 V, NPN | |
| Reference switch repeatability | 1 µm | 1 µm | 1 µm | 1 µm | 1 µm | 1 µm | |
| Limit switches | Forked photoelectric sensor, N/C contact, 5 V, NPN | Forked photoelectric sensor, N/C contact, 5 V, NPN | Forked photoelectric sensor, N/C contact, 5 V, NPN | Forked photoelectric sensor, N/C contact, 5 V, NPN | Forked photoelectric sensor, N/C contact, 5 V, NPN | Forked photoelectric sensor, N/C contact, 5 V, NPN | |
| Integrated sensor | — | Incremental linear encoder | Incremental linear encoder | Incremental linear encoder | Incremental linear encoder | Incremental rotary encoder | |
| Sensor signal | — | Sin/cos, 1 V peak-to-peak | A/B quadrature, RS-422 | Sin/cos, 1 V peak-to-peak | A/B quadrature, RS-422 | A/B quadrature, RS-422 | |
| Sensor signal period | — | 20 µm | — | 20 µm | — | — | |
| Sensor resolution | — | 1 nm | 10 nm | 1 nm | 10 nm | — | |
| Sensor resolution | — | — | — | — | — | 20000 Cts./rev. | |
| Drive properties | L-741.131100 | L-741.131111 | L-741.131112 | L-741.133111 | L-741.133112 | L-741.133132 | Tolerance |
| Drive type | 2-phase stepper motor | 2-phase stepper motor | 2-phase stepper motor | DC motor | DC motor | DC motor | |
| Operating voltage | 24 V | 24 V | 24 V | 24 V | 24 V | 24 V | |
| Nominal current, RMS | 1.2 A | 1.2 A | 1.2 A | 3.9 A | 3.9 A | 3.9 A | typ. |
| Motor resolution | 200 Full steps/rev. | 200 Full steps/rev. | 200 Full steps/rev. | — | — | — | |
| Drive force in X | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | typ. |
| Drive force in Y | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | typ. |
| Resistance phase-phase | 3.4 Ω | 3.4 Ω | 3.4 Ω | 0.62 Ω | 0.62 Ω | 0.62 Ω | typ. |
| Mechanical properties | L-741.131100 | L-741.131111 | L-741.131112 | L-741.133111 | L-741.133112 | L-741.133132 | Tolerance |
| Permissible push force in Z | 200 N | 200 N | 200 N | 200 N | 200 N | 200 N | max. |
| Permissible torque in θX | 125 N·m | 125 N·m | 125 N·m | 125 N·m | 125 N·m | 125 N·m | max. |
| Permissible torque in θY | 125 N·m | 125 N·m | 125 N·m | 125 N·m | 125 N·m | 125 N·m | max. |
| Permissible torque in θZ | 125 N·m | 125 N·m | 125 N·m | 125 N·m | 125 N·m | 125 N·m | max. |
| Moved mass in X, unloaded | 19900 g | 19900 g | 19900 g | 20200 g | 20200 g | 20200 g | |
| Moved mass in Y, unloaded | 6100 g | 6100 g | 6100 g | 6100 g | 6100 g | 6100 g | |
| Drive screw type | Ball screw | Ball screw | Ball screw | Ball screw | Ball screw | Ball screw | |
| Drive screw pitch | 2 mm | 2 mm | 2 mm | 2 mm | 2 mm | 2 mm | |
| Guide | Crossed roller guide | Crossed roller guide | Crossed roller guide | Crossed roller guide | Crossed roller guide | Crossed roller guide | |
| Overall mass | 27500 g | 27500 g | 27500 g | 28000 g | 28000 g | 28000 g | |
| Material | Black anodized aluminum | Black anodized aluminum | Black anodized aluminum | Black anodized aluminum | Black anodized aluminum | Black anodized aluminum | |
| Miscellaneous | L-741.131100 | L-741.131111 | L-741.131112 | L-741.133111 | L-741.133112 | L-741.133132 | Tolerance |
| Operating temperature range | 5 to 40 °C | 5 to 40 °C | 5 to 40 °C | 5 to 40 °C | 5 to 40 °C | 5 to 40 °C | |
| Connector | 2 × HD D-sub 26 (m) | 2 × HD D-sub 26 (m) | 2 × HD D-sub 26 (m) | 2 × HD D-sub 26 (m) | 2 × HD D-sub 26 (m) | 2 × HD D-sub 26 (m) | |
| Sensor connector | — | 2 × D-sub 15 (f) | — | 2 × D-sub 15 (f) | — | — | |
| Recommended controllers/drivers | G-901.R319 G-902.R2E001 C-663.12, C-885 with C-663.12C885 ACS modular controller | G-901.R319 G-902.R2E001 ACS modular controller | G-901.R319 G-902.R2E001 C-663.12, C-885 with C-663.12C885 ACS modular controller | G-901.R319 G-902.R2E001 ACS modular controller | G-901.R319 G-902.R2E001 C-863.12, C-885 with C-863.20C885 ACS modular controller | G-901.R319 G-902.R2E001 C-863.12, C-885 with C-863.20C885 ACS modular controller |
At PI, technical data is specified at 22 ±3 °C. Unless otherwise stated, the values are for unloaded conditions. Some properties are interdependent. The designation "typ." indicates a statistical average for a property; it does not indicate a guaranteed value for every product supplied. During the final inspection of a product, only selected properties are analyzed, not all. Please note that some product characteristics may deteriorate with increasing operating time.
Positioners with Electric Motors: DT-xx / HPS-170 / L-xxx / LS-xxx / PRS-xxx / RS-40 / UPL-120 / VT-80 / WT-xx / WT-xxx
L-741 / V-741 Precision XY Stage
Ask for a free quote on quantities required, prices, and lead times or describe your desired modification.
Precision XY stage; 2-phase stepper motor; 305 mm × 305 mm travel range (X × Y); 200 N load capacity; 45 mm/s × 45 mm/s maximum velocity; ball screw
Precision XY stage; 2-phase stepper motor; 305 mm × 305 mm travel range (X × Y); 200 N load capacity; 45 mm/s × 45 mm/s maximum velocity; ball screw; incremental linear encoder, 20 µm sensor signal period, sin/cos, 1 V peak-peak
Precision XY stage; 2-phase stepper motor; 305 mm x 305 mm travel range (X × Y); 200 N load capacity; 45 mm/s × 45 mm/s maximum velocity; ball screw; incremental linear encoder, 10 nm sensor resolution, A/B quadrature, RS-422
Precision XY stage; DC motor; 305 mm × 305 mm travel range (X × Y); 200 N load capacity; 50 mm/s × 50 mm/s maximum velocity; ball screw; incremental linear encoder, 20 µm sensor signal period, sin/cos, 1 V peak-peak
Precision XY stage; DC motor; 305 mm x 305 mm travel range (X × Y); 200 N load capacity; 50 mm/s × 50 mm/s maximum velocity; ball screw; incremental linear encoder, 10 nm sensor resolution, A/B quadrature, RS-422
Precision XY stage; DC motor; 305 mm × 305 mm travel range (X × Y); 200 N load capacity; 90 mm/s × 90 mm/s maximum velocity; ball screw; incremental rotary encoder, 20000 counts/rev sensor resolution, A/B quadrature, RS-422
Quickly receive an answer to your question by email or phone from a local PI sales engineer.

Positioners with travel ranges from several millimeters to one meter usually utilize traditional mechanical guide components such as ball bearings.

PI utilise des systèmes de mesure incrémentaux pour des gammes de déplacements plus longues, à partir d'un millimètre approximativement. Ces capteurs qui, dans la plupart des cas sont des capteurs optiques, offrent une résolution de position de l'ordre du picomètre.

Les moteurs électriques rotatifs tels que les moteur DC ou moteurs pas à pas sont utilisés en liaison avec des entraînements à vis.

Les plateformes hexapode sont utilisées pour le positionnement de précision et l'alignement de charges selon six degrés de liberté, trois axes linéaires et trois axes rotatifs.

Be it in medicine, forensics, or genetics - the genome is the key to new insights for numerous questions. The method known as sequencing-by-synthesis, which used to decipher the genome, has become faster and more precise since it was first developed — the cost has decreased, respectively. The positioning techniques employed in the microscope systems used for this purpose have also contributed to...

Modern medical technology focuses on developing therapies that cause as little discomfort to patients as possible. Endoscopes that allow minimally invasive surgery, make an important contribution to this, for example, in laparoscopy. Especially during medical interventions, the demand for focused and detailed image information is of the highest priority in order to achieve the best possible...
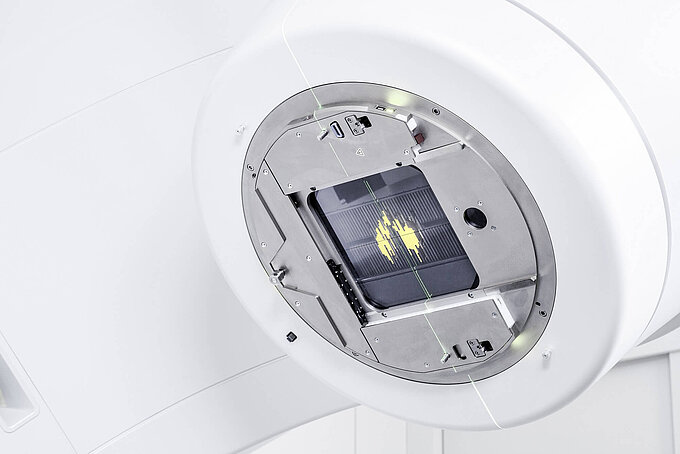
In radiation therapy, the individual leaves are adjusted so that the healthy tissue offers the optimum protection from the radiation.

Fast, piezo-based scanners operate with the necessary velocities in the video frequency range for image stabilization and microscanning.

Piezomotors are suited for pipetting with small devices and sample separations and are able to move the pipettes in the vertical direction.
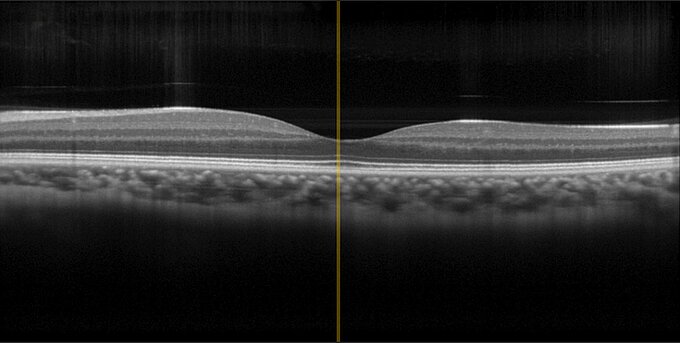
Piezo actuators and drives, e.g., PILine® OEM motors, ensure the high precision and position stability required for optical coherence tomography (OCT).

Piezo drives are well suited for magnetic resonance therapy, because they are not influenced by strong magnetic fields.
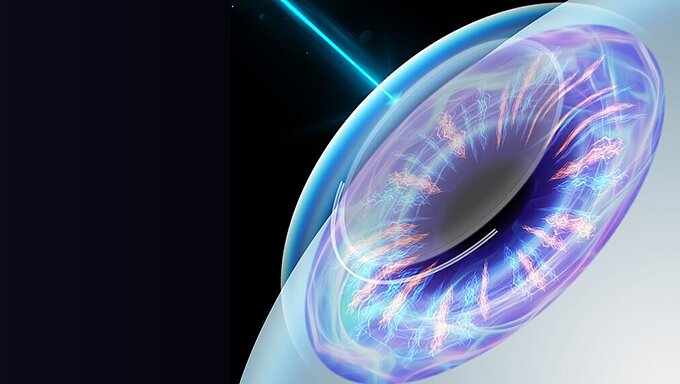
In refractive surgery, high-precision positioning and motion control of the laser are decisive for good results. Piezo-driven stages and tip/tilt mirror systems offer the requested precision, are dynamic and fast and thus additionally help to reduce the treatment time.



















