|
Active axes
|
θZ
|
θZ
|
θZ
|
θZ
|
θZ
|
θZ
|
|
|
Rotation range in θZ
|
360 °
|
360 °
|
360 °
|
360 °
|
360 °
|
360 °
|
|
|
Maximum angular velocity in θZ, unloaded
|
1200 rpm
|
1000 rpm
|
200 rpm
|
1200 rpm
|
1000 rpm
|
200 rpm
|
|
|
Radial error in X
|
± 2 µm
|
± 2 µm
|
± 2 µm
|
± 2 µm
|
± 2 µm
|
± 2 µm
|
typ.
|
|
Axial error
|
± 2 µm
|
± 2 µm
|
± 2 µm
|
± 2 µm
|
± 2 µm
|
± 2 µm
|
typ.
|
|
Tilt error around X (wobble)
|
± 20 µrad
|
± 20 µrad
|
± 20 µrad
|
± 20 µrad
|
± 20 µrad
|
± 20 µrad
|
typ.
|
|
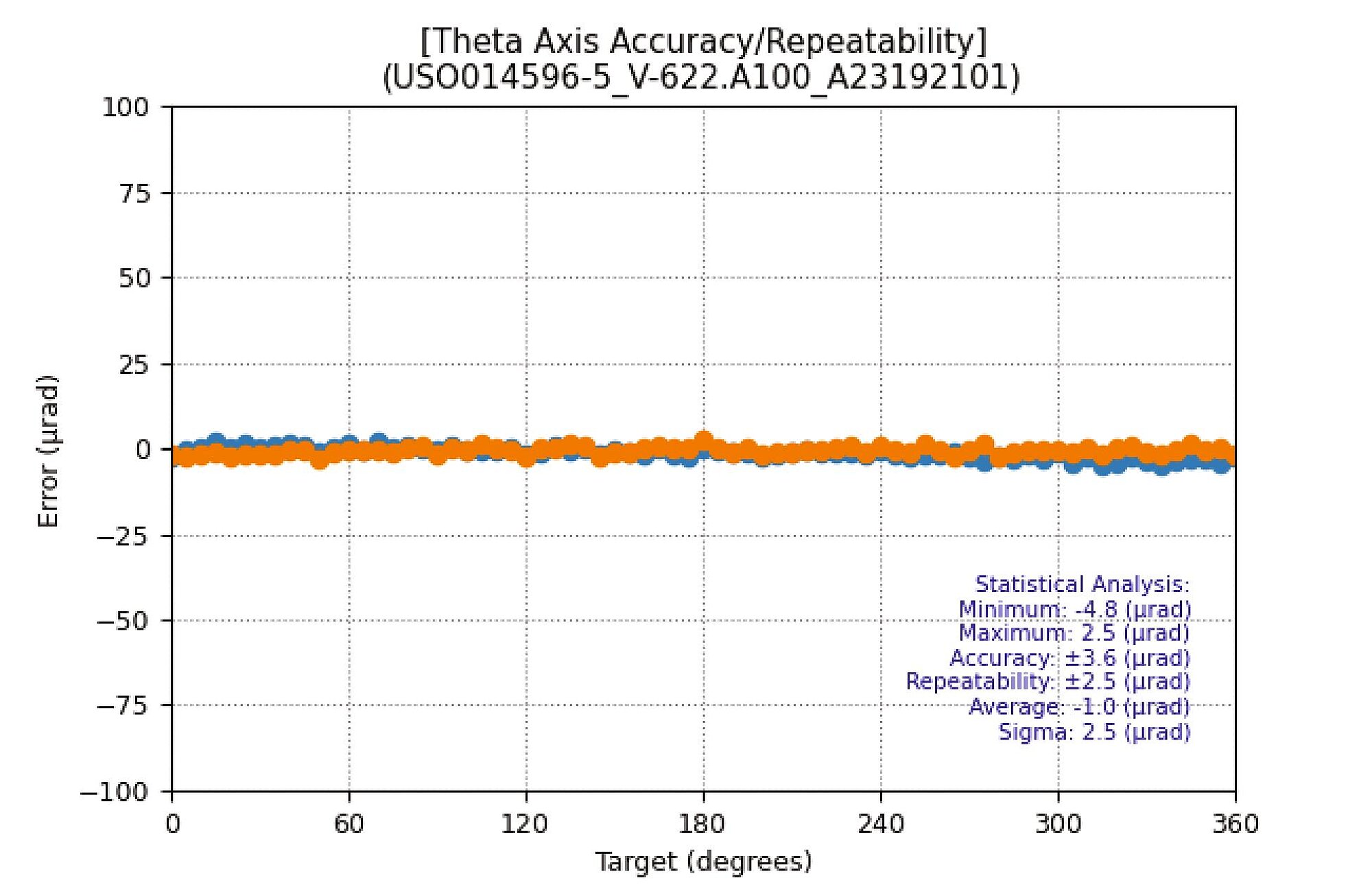
Positioning
|
V-622.A100
|
V-623.A100
|
V-625.A100
|
V-622.B100
|
V-623.B100
|
V-625.B100
|
Tolerance
|
|
Positioning accuracy in θZ, calibrated
|
± 10 µrad
|
± 10 µrad
|
± 10 µrad
|
± 10 µrad
|
± 10 µrad
|
± 10 µrad
|
typ.
|
|
Bidirectional repeatability in θZ
|
10 µrad
|
10 µrad
|
5 µrad
|
10 µrad
|
10 µrad
|
5 µrad
|
typ.
|
|
Reference switch
|
1/revolution, differential pulse over one sensor signal period, 1 V peak-to-peak
|
1/revolution, differential pulse over one sensor signal period, 1 V peak-to-peak
|
1/revolution, differential pulse over one sensor signal period, 1 V peak-to-peak
|
—
|
—
|
—
|
|
|
Integrated sensor
|
Incremental angle-measuring system
|
Incremental angle-measuring system
|
Incremental angle-measuring system
|
Absolute angle-measuring system
|
Absolute angle-measuring system
|
Absolute angle-measuring system
|
|
|
Sensor signal
|
Sin/cos, 1 V peak-to-peak
|
Sin/cos, 1 V peak-to-peak
|
Sin/cos, 1 V peak-to-peak
|
BiSS-C, 32-bit
|
BiSS-C, 32-bit
|
BiSS-C, 32-bit
|
|
|
Sensor signal periods/U
|
11840
|
15744
|
31488
|
—
|
—
|
—
|
|
|
Sensor resolution, rotational
|
0.13 µrad
|
0.097 µrad
|
0.049 µrad
|
0.0015 µrad
|
0.0015 µrad
|
0.0015 µrad
|
|
|
Drive properties
|
V-622.A100
|
V-623.A100
|
V-625.A100
|
V-622.B100
|
V-623.B100
|
V-625.B100
|
Tolerance
|
|
Drive type
|
Ironless 3-phase torque motor
|
Ironless 3-phase torque motor
|
Ironless 3-phase torque motor
|
Ironless 3-phase torque motor
|
Ironless 3-phase torque motor
|
Ironless 3-phase torque motor
|
|
|
Peak voltage
|
80 V
|
80 V
|
80 V
|
80 V
|
80 V
|
80 V
|
|
|
Nominal current, RMS
|
4.9 A
|
4.6 A
|
4.3 A
|
4.9 A
|
4.6 A
|
4.3 A
|
typ.
|
|
Peak current, RMS
|
13.8 A
|
13.8 A
|
13.8 A
|
13.8 A
|
13.8 A
|
13.8 A
|
typ.
|
|
Drive torque in θZ
|
0.57 N·m
|
1.4 N·m
|
4.1 N·m
|
0.57 N·m
|
1.4 N·m
|
4.1 N·m
|
|
|
Peak torque in θZ
|
1.22 N·m
|
2.9 N·m
|
9.3 N·m
|
1.22 N·m
|
2.9 N·m
|
9.3 N·m
|
|
|
Torque constant
|
0.117 N·m/A
|
0.3 N·m/A
|
0.96 N·m/A
|
0.117 N·m/A
|
0.3 N·m/A
|
0.96 N·m/A
|
typ.
|
|
Resistance phase-phase
|
1.7 Ω
|
2.76 Ω
|
4.94 Ω
|
1.7 Ω
|
2.76 Ω
|
4.94 Ω
|
typ.
|
|
Inductance phase-phase
|
2.7 mH
|
5.2 mH
|
9.8 mH
|
2.7 mH
|
5.2 mH
|
9.8 mH
|
|
|
Back EMF, phase-phase, rotational
|
10 V/kRPM
|
25 V/kRPM
|
82 V/kRPM
|
10 V/kRPM
|
25 V/kRPM
|
82 V/kRPM
|
max.
|
|
Number of pole pairs
|
12
|
20
|
36
|
12
|
20
|
36
|
|
|
Mechanical properties
|
V-622.A100
|
V-623.A100
|
V-625.A100
|
V-622.B100
|
V-623.B100
|
V-625.B100
|
Tolerance
|
|
Permissible push force in X
|
50 N
|
75 N
|
100 N
|
50 N
|
75 N
|
100 N
|
max.
|
|
Permissible push force in Y
|
50 N
|
75 N
|
100 N
|
50 N
|
75 N
|
100 N
|
max.
|
|
Permissible push force in Z
|
100 N
|
150 N
|
400 N
|
100 N
|
150 N
|
400 N
|
max.
|
|
Permissible torque in θX
|
5 N·m
|
10 N·m
|
20 N·m
|
5 N·m
|
10 N·m
|
20 N·m
|
max.
|
|
Permissible torque in θY
|
5 N·m
|
10 N·m
|
20 N·m
|
5 N·m
|
10 N·m
|
20 N·m
|
max.
|
|
Moment of inertia in θZ, unloaded
|
331 kg·mm²
|
1188 kg·mm²
|
26000 kg·mm²
|
331 kg·mm²
|
1188 kg·mm²
|
26000 kg·mm²
|
±20 %
|
|
Bearing type
|
Ball bearings
|
Ball bearings
|
Ball bearings
|
Ball bearings
|
Ball bearings
|
Ball bearings
|
|
|
Overall mass
|
1300 g
|
2400 g
|
11000 g
|
1300 g
|
2400 g
|
11000 g
|
±5 %
|
|
Material
| Hardcoat aluminum (base body), stainless steel (bearing and mounting hardware) | Hardcoat aluminum (base body), stainless steel (bearing and mounting hardware) | Hardcoat aluminum (base body), stainless steel (bearing and mounting hardware) | Hardcoat aluminum (base body), stainless steel (bearing and mounting hardware) | Hardcoat aluminum (base body), stainless steel (bearing and mounting hardware) | Hardcoat aluminum (base body), stainless steel (bearing and mounting hardware) |
|
|
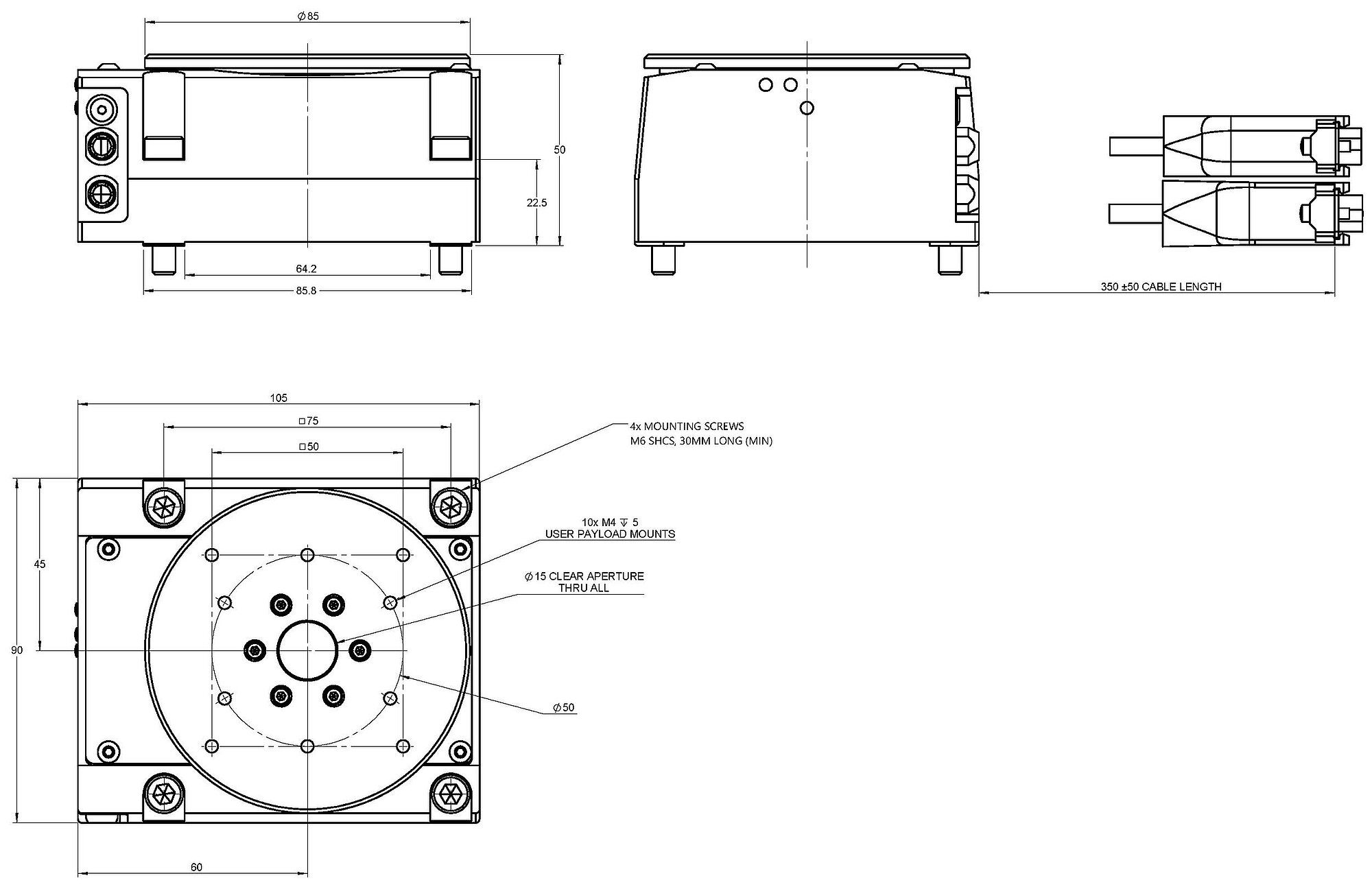
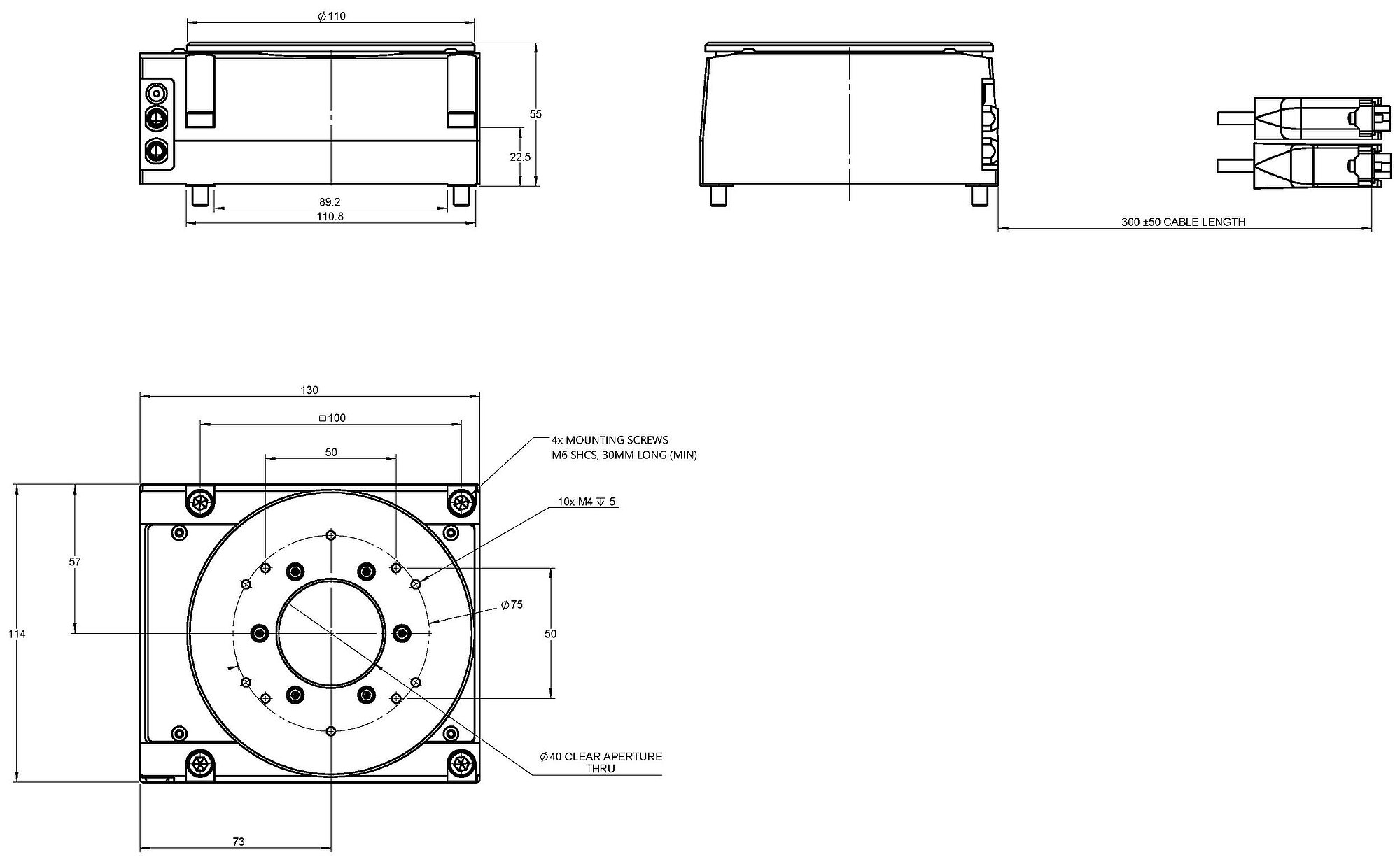
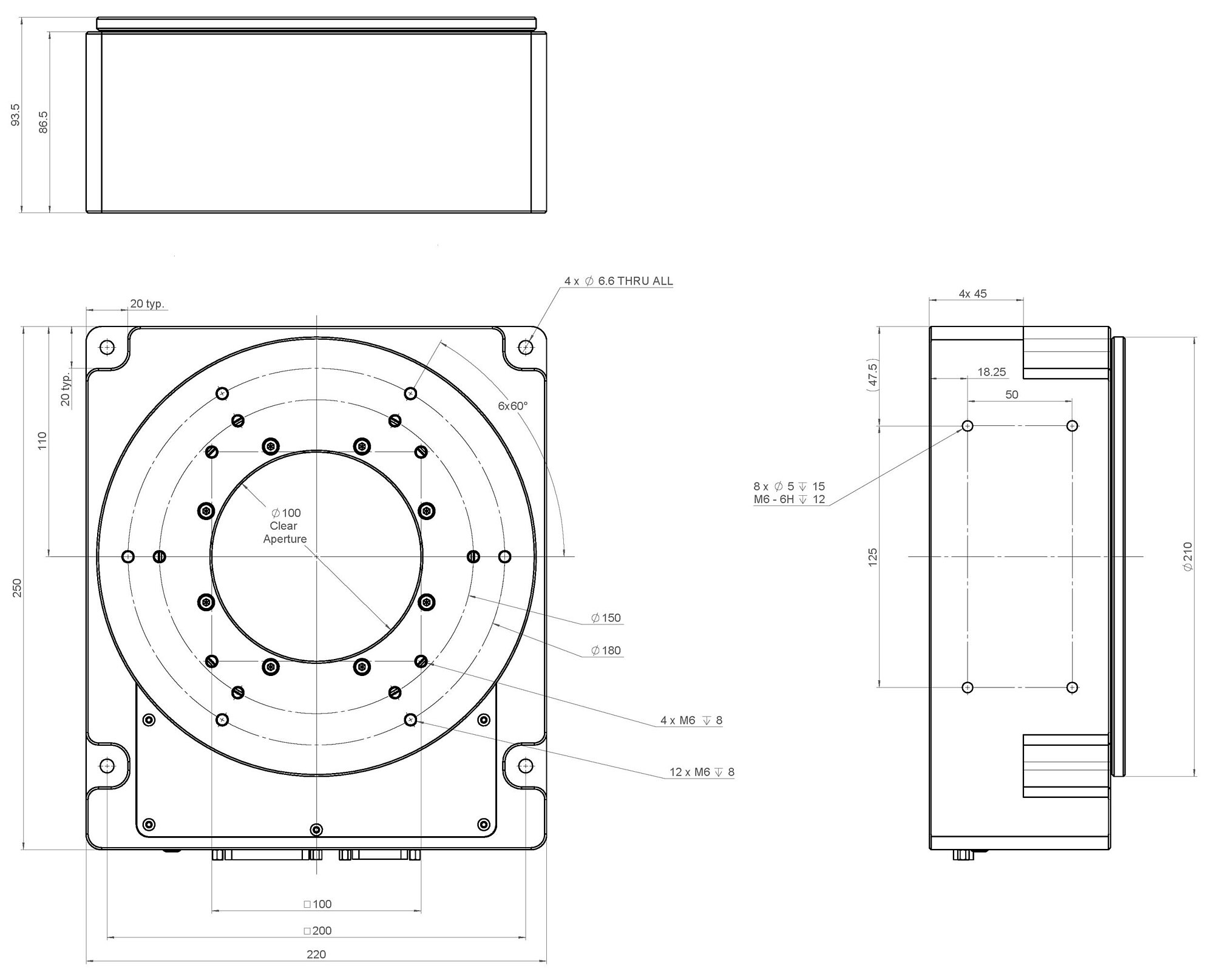
Aperture diameter
|
15 mm
|
40 mm
|
100 mm
|
15 mm
|
40 mm
|
100 mm
|
|
|
Motion platform diameter
|
85 mm
|
110 mm
|
210 mm
|
85 mm
|
110 mm
|
210 mm
|
|
|
Height
|
50 mm
|
55 mm
|
93.5 mm
|
50 mm
|
55 mm
|
93.5 mm
|
|
|
Miscellaneous
|
V-622.A100
|
V-623.A100
|
V-625.A100
|
V-622.B100
|
V-623.B100
|
V-625.B100
|
Tolerance
|
|
Operating temperature range
|
5 to 50 °C
|
5 to 50 °C
|
5 to 50 °C
|
5 to 50 °C
|
5 to 50 °C
|
5 to 50 °C
|
|
|
Connector
|
D-sub 9W4 (m)
|
D-sub 9W4 (m)
|
D-sub 9W4 (m)
|
D-sub 9W4 (m)
|
D-sub 9W4 (m)
|
D-sub 9W4 (m)
|
|
|
Sensor connector
|
D-sub 15 (m)
|
D-sub 15 (m)
|
D-sub 15 (m)
|
D-sub 15 (m)
|
D-sub 15 (m)
|
D-sub 15 (m)
|
|
|
Recommended controllers/drivers
| A-81x, A-82x | A-81x, A-82x | A-81x, A-82x | A-81x, A-82x | A-81x, A-82x | A-81x, A-82x |
|