A-634.A100
PIglide RL rotation stage, air bearing, 150 mm motion platform diameter, low height, angle measuring system with sin/cos signal transmission, slotless, brushless 3-phase torque motor
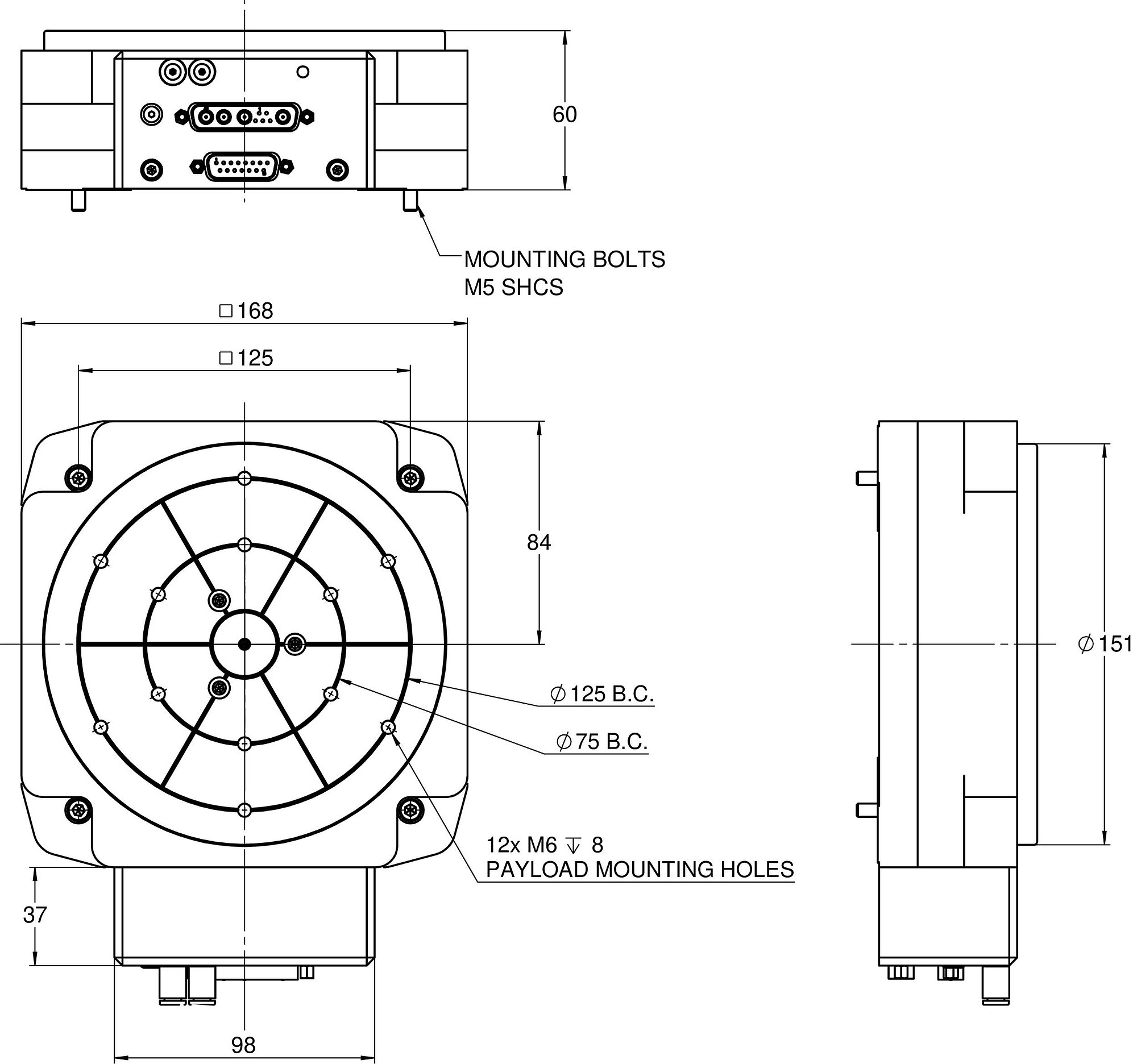
A-634, dimensions in mm
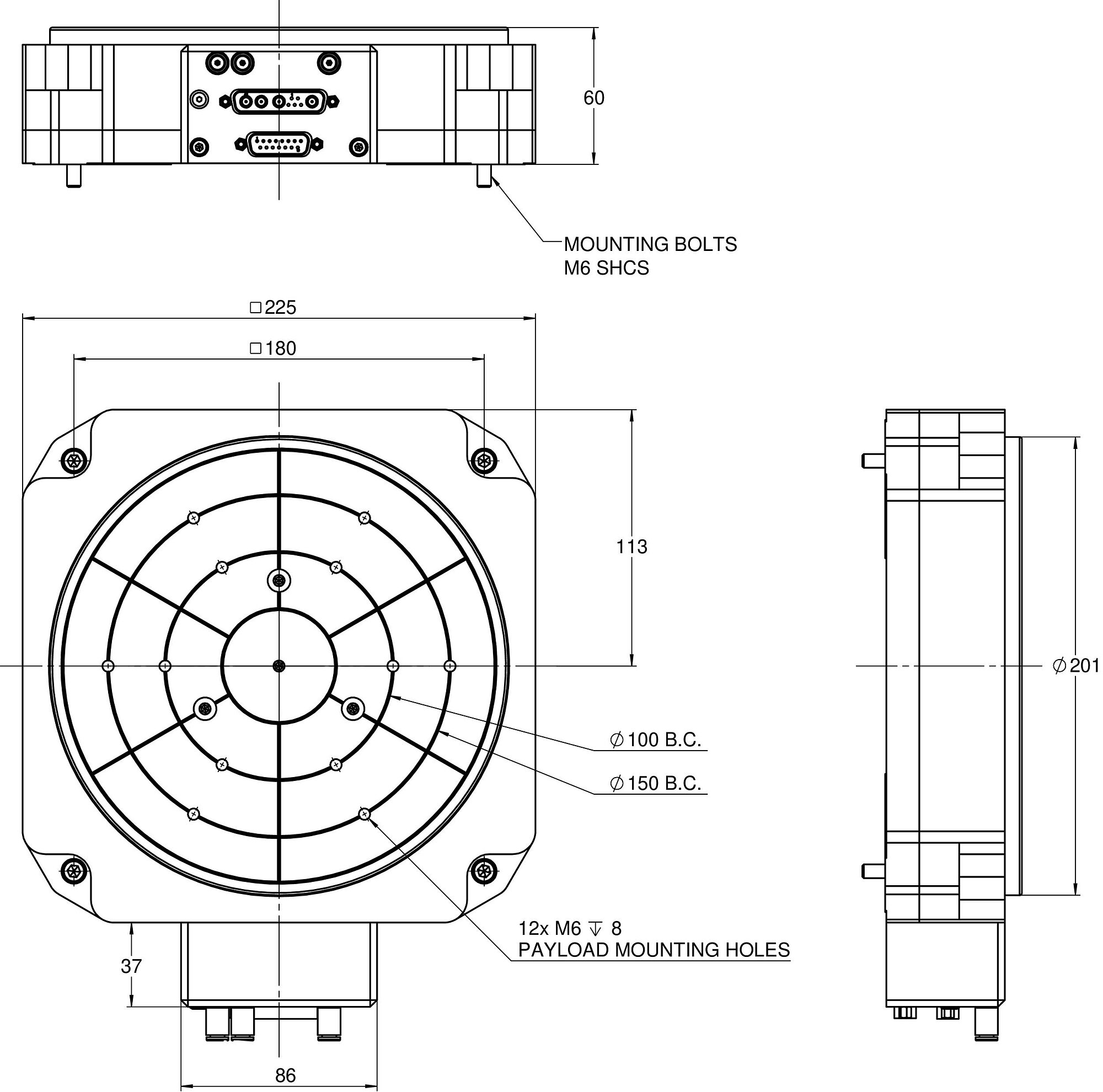
A-635, dimensions in mm
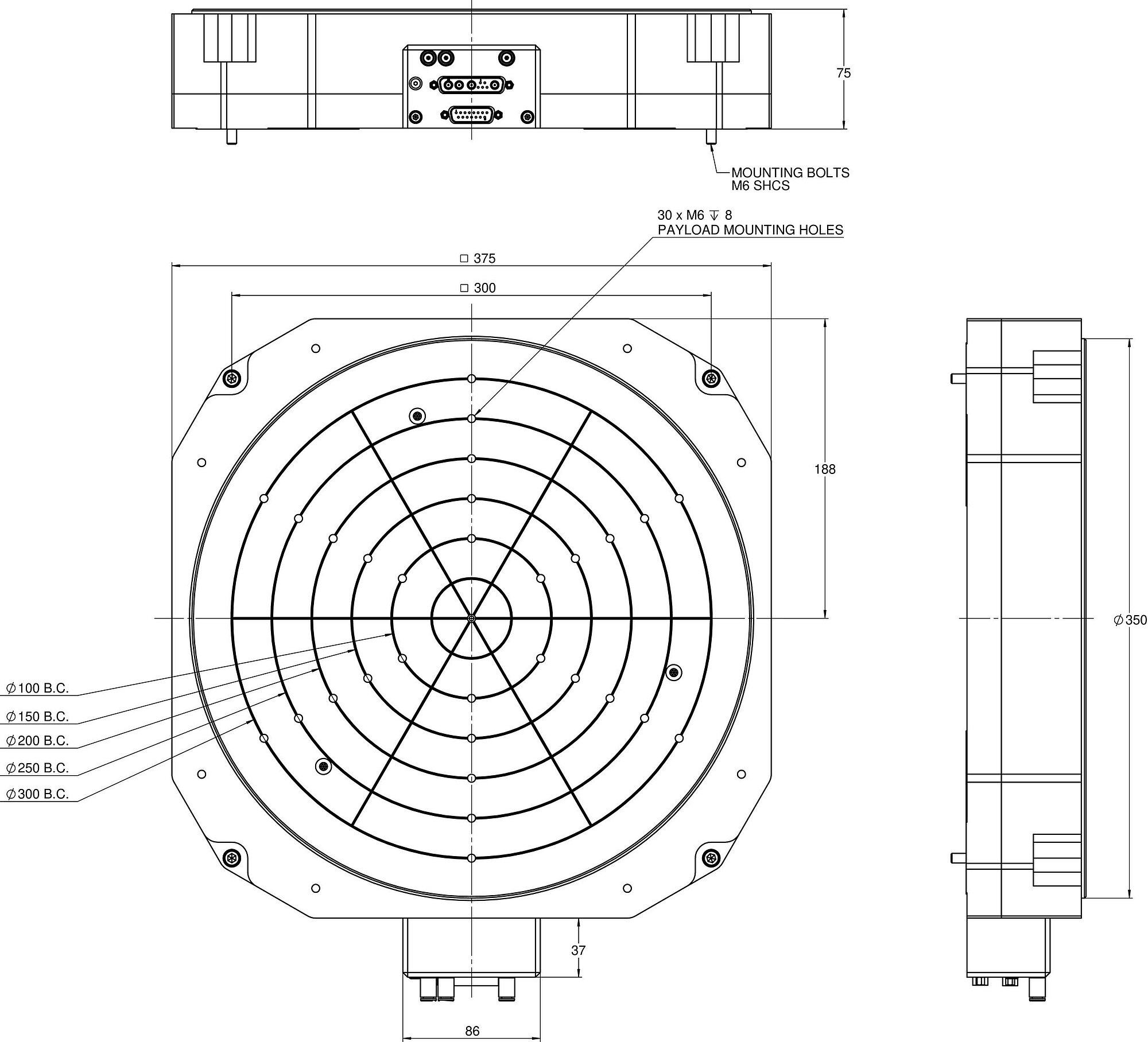
A-638, dimensions in mm




Product overview
The directly driven low-profile rotation stages of the PIglide RL series are designed for the highest precision with low-profile design. Various options can be combined to create a solution ideal for point-to-point indexing or constant velocity scanning. The RL stages offer superior travel accuracy, flatness, and wobble performance.
3-Phase torque motor
Absolute encoder (optional)
Absolute encoders supply explicit position information that enables immediate determination of the position. This means that referencing is not required during switch-on, which increases efficiency and safety during operation.
Accessories and options
Application fields
Optical alignment, wafer inspection, wafer alignment, measuring technology, inspection systems, calibration, scanning.
Thanks to the friction-free motion, no particles are formed, which makes PIglide stages ideal for cleanroom applications.
| Motion | A-634.A100 | A-634.B100 | A-635.A100 | A-635.B100 | A-638.A100 | A-638.B100 | Tolerance |
|---|---|---|---|---|---|---|---|
| Active axes | θZ | θZ | θZ | θZ | θZ | θZ | |
| Rotation range in θZ | 360 ° | 360 ° | 360 ° | 360 ° | 360 ° | 360 ° | |
| Maximum angular velocity in θZ, unloaded | 500 rpm | 500 rpm | 500 rpm | 500 rpm | 500 rpm | 500 rpm | |
| Radial error in X | ± 0.1 µm | ± 0.1 µm | ± 0.075 µm | ± 0.075 µm | ± 0.05 µm | ± 0.05 µm | max. |
| Axial error | ± 0.038 µm | ± 0.038 µm | ± 0.038 µm | ± 0.038 µm | ± 0.025 µm | ± 0.025 µm | max. |
| Tilt error around X (wobble) | ± 1 µrad | ± 1 µrad | ± 1 µrad | ± 1 µrad | ± 0.5 µrad | ± 0.5 µrad | max. |
| Positioning | A-634.A100 | A-634.B100 | A-635.A100 | A-635.B100 | A-638.A100 | A-638.B100 | Tolerance |
| Positioning accuracy in θZ, calibrated | ± 8 µrad | ± 8 µrad | ± 8 µrad | ± 8 µrad | ± 8 µrad | ± 8 µrad | typ. |
| Bidirectional repeatability in θZ | 4 µrad | 4 µrad | 4 µrad | 4 µrad | 4 µrad | 4 µrad | typ. |
| Reference switch | 1/revolution, differential pulse over one sensor signal period, 1 V peak-to-peak | — | 1/revolution, differential pulse over one sensor signal period, 1 V peak-to-peak | — | 1/revolution, differential pulse over one sensor signal period, 1 V peak-to-peak | — | |
| Integrated sensor | Incremental angle-measuring system | Absolute angle-measuring system | Incremental angle-measuring system | Absolute angle-measuring system | Incremental angle-measuring system | Absolute angle-measuring system | |
| Sensor signal | Sin/cos, 1 V peak-to-peak | BiSS-C | Sin/cos, 1 V peak-to-peak | BiSS-C | Sin/cos, 1 V peak-to-peak | BiSS-C | |
| Sensor signal periods/U | 23600 | — | 31488 | — | 31488 | — | |
| Sensor resolution, rotational | 0.06 µrad | 0.0015 µrad | 0.05 µrad | 0.0015 µrad | 0.05 µrad | 0.0015 µrad | |
| Drive properties | A-634.A100 | A-634.B100 | A-635.A100 | A-635.B100 | A-638.A100 | A-638.B100 | Tolerance |
| Drive type | Ironless 3-phase torque motor | Ironless 3-phase torque motor | Ironless 3-phase torque motor | Ironless 3-phase torque motor | Ironless 3-phase torque motor | Ironless 3-phase torque motor | |
| Nominal voltage | 48 V | 48 V | 48 V | 48 V | 48 V | 48 V | |
| Peak voltage | 80 V | 80 V | 80 V | 80 V | 80 V | 80 V | |
| Nominal current, RMS | 2.3 A | 2.3 A | 4.5 A | 4.5 A | 4.5 A | 4.5 A | typ. |
| Peak current, RMS | 6.9 A | 6.9 A | 13.9 A | 13.9 A | 13.9 A | 13.9 A | typ. |
| Drive torque clockwise in θZ | 1.6 N·m | 1.6 N·m | 2.8 N·m | 2.8 N·m | 2.8 N·m | 2.8 N·m | max. |
| Drive torque counterclockwise in θZ | 1.6 N·m | 1.6 N·m | 2.8 N·m | 2.8 N·m | 2.8 N·m | 2.8 N·m | max. |
| Peak torque clockwise in θZ | 4.7 N·m | 4.7 N·m | 8.5 N·m | 8.5 N·m | 8.5 N·m | 8.5 N·m | max. |
| Peak torque counterclockwise in θZ | 4.7 N·m | 4.7 N·m | 8.5 N·m | 8.5 N·m | 8.5 N·m | 8.5 N·m | max. |
| Torque constant | 0.59 N·m/A | 0.59 N·m/A | 0.66 N·m/A | 0.66 N·m/A | 0.66 N·m/A | 0.66 N·m/A | typ. |
| Resistance phase-phase | 6.7 Ω | 6.7 Ω | 4.5 Ω | 4.5 Ω | 4.5 Ω | 4.5 Ω | typ. |
| Inductance phase-phase | 0.9 mH | 0.9 mH | 0.6 mH | 0.6 mH | 0.6 mH | 0.6 mH | |
| Back EMF, phase-phase, rotational | 71 V/kRPM | 71 V/kRPM | 80 V/kRPM | 80 V/kRPM | 80 V/kRPM | 80 V/kRPM | max. |
| Mechanical properties | A-634.A100 | A-634.B100 | A-635.A100 | A-635.B100 | A-638.A100 | A-638.B100 | Tolerance |
| Permissible push force in X | 40 N | 40 N | 80 N | 80 N | 200 N | 200 N | max. |
| Permissible push force in Y | 40 N | 40 N | 80 N | 80 N | 200 N | 200 N | max. |
| Permissible push force in Z | 190 N | 190 N | 320 N | 320 N | 1200 N | 1200 N | max. |
| Permissible torque in θX | 4.5 N·m | 4.5 N·m | 12 N·m | 12 N·m | 130 N·m | 130 N·m | max. |
| Permissible torque in θY | 4.5 N·m | 4.5 N·m | 12 N·m | 12 N·m | 130 N·m | 130 N·m | max. |
| Moment of inertia in θZ, unloaded | 6710 kg·mm² | 6710 kg·mm² | 21580 kg·mm² | 21580 kg·mm² | 147090 kg·mm² | 147090 kg·mm² | ±20 % |
| Moved mass in θZ, unloaded | 1900 g | 1900 g | 3600 g | 3600 g | 11000 g | 11000 g | ±5 % |
| Bearing type | Air bearings with magnetic preload | Air bearings with magnetic preload | Air bearings with magnetic preload | Air bearings with magnetic preload | Air bearings with magnetic preload | Air bearings with magnetic preload | |
| Overall mass | 4600 g | 4600 g | 7500 g | 7500 g | 24000 g | 24000 g | ±5 % |
| Material | Hardcoat aluminum, stainless steel mounting hardware | Hardcoat aluminum, stainless steel mounting hardware | Hardcoat aluminum, stainless steel mounting hardware | Hardcoat aluminum, stainless steel mounting hardware | Hardcoat aluminum, stainless steel mounting hardware | Hardcoat aluminum, stainless steel mounting hardware | |
| Miscellaneous | A-634.A100 | A-634.B100 | A-635.A100 | A-635.B100 | A-638.A100 | A-638.B100 | Tolerance |
| Operating temperature range | 15 to 25 °C | 15 to 25 °C | 15 to 25 °C | 15 to 25 °C | 15 to 25 °C | 15 to 25 °C | |
| Connector | D-sub 9W4 (m) | D-sub 9W4 (m) | D-sub 9W4 (m) | D-sub 9W4 (m) | D-sub 9W4 (m) | D-sub 9W4 (m) | |
| Sensor connector | D-sub 15 (m) | D-sub 15 (m) | D-sub 15 (m) | D-sub 15 (m) | D-sub 15 (m) | D-sub 15 (m) | |
| Operating pressure | 515 to 585 kPa | 515 to 585 kPa | 515 to 585 kPa | 515 to 585 kPa | 515 to 585 kPa | 515 to 585 kPa | |
| Air consumption | 56 L/min | 56 L/min | 56 L/min | 56 L/min | 56 L/min | 56 L/min | max. |
| Air quality | Clean (filtered up to 1.0 µm or better) - ISO 8573–1 class 1 ǀ Oil free - ISO 8573–1 class 1 ǀ Dry (-15 °C dew point) - ISO 8573–1 class 3 | Clean (filtered up to 1.0 µm or better) - ISO 8573–1 class 1 ǀ Oil free - ISO 8573–1 class 1 ǀ Dry (-15 °C dew point) - ISO 8573–1 class 3 | Clean (filtered up to 1.0 µm or better) - ISO 8573–1 class 1 ǀ Oil free - ISO 8573–1 class 1 ǀ Dry (-15 °C dew point) - ISO 8573–1 class 3 | Clean (filtered up to 1.0 µm or better) - ISO 8573–1 class 1 ǀ Oil free - ISO 8573–1 class 1 ǀ Dry (-15 °C dew point) - ISO 8573–1 class 3 | Clean (filtered up to 1.0 µm or better) - ISO 8573–1 class 1 ǀ Oil free - ISO 8573–1 class 1 ǀ Dry (-15 °C dew point) - ISO 8573–1 class 3 | Clean (filtered up to 1.0 µm or better) - ISO 8573–1 class 1 ǀ Oil free - ISO 8573–1 class 1 ǀ Dry (-15 °C dew point) - ISO 8573–1 class 3 | |
| Recommended controllers/drivers | A-81x (1, 2, or 4 axes) A-82x (4, 6, or 8 axes) | A-81x (1, 2, or 4 axes) A-82x (4, 6, or 8 axes) | A-81x (1, 2, or 4 axes) A-82x (4, 6, or 8 axes) | A-81x (1, 2, or 4 axes) A-82x (4, 6, or 8 axes) | A-81x (1, 2, or 4 axes) A-82x (4, 6, or 8 axes) | A-81x (1, 2, or 4 axes) A-82x (4, 6, or 8 axes) |
Note on linear and rotational crosstalk: Dependent on the quality of the underlying surface, the payload, orientation, and forces that act on the stage from the outside. Please contact PI for
application-specific parameters. The specified values are static (no rotary motion during measuring) and without load.
Note on permissible push force and permissible torque: The values listed assume a supply pressure of 550 kPa (80 psi). Please contact PI if other pressures are required.
Note on angular velocity: May be limited by the payload, payload imbalance, controller or drive.
Note on sensor resolution for A-63x.A100: Assumes 4096x interpolation. Contact PI for the use of other factors.
Note on positioning accuracy: The specified values are based on error compensation controlled by the controller. The stage must be ordered with an A-8xx series controller from PI to reach these values. Accuracy values assume short-term duration and do not consider the long-term effects of thermal drift on the stage.
Note on operating pressure: To protect the stage against damage, it is recommended to connect an air pressure sensor to the Motion-Stop input of the controller.
Ask about customized versions.
At PI, technical data is specified at 22 ±3 °C. Unless otherwise stated, the values are for unloaded conditions. Some properties are interdependent. The designation "typ." indicates a statistical average for a property; it does not indicate a guaranteed value for every product supplied. During the final inspection of a product, only selected properties are analyzed, not all. Please note that some product characteristics may deteriorate with increasing operating time.
A-63x Series Low Profile Rotary Air Bearing Stage PIglide RL, Direct-drive Torque Motor Driven with Encoder Feedback
Ask for a free quote on quantities required, prices, and lead times or describe your desired modification.
PIglide RL rotation stage, air bearing, 150 mm motion platform diameter, low height, angle measuring system with sin/cos signal transmission, slotless, brushless 3-phase torque motor
PIglide RL rotation stage, air bearing, 150 mm motion platform diameter, low height, absolute angle-measuring system with BiSS-C signal transmission, slotless, brushless 3-phase torque motor
PIglide RL rotation stage, air bearing, 200 mm motion platform diameter, low height, angle measuring system with sin/cos signal transmission, slotless, brushless 3-phase torque motor
PIglide RL rotation stage, air bearing, 200 mm motion platform diameter, low height, absolute angle-measuring system with BiSS-C signal transmission, slotless, brushless 3-phase torque motor
PIglide RL rotation stage, air bearing, 350 mm motion platform diameter, low height, angle measuring system with sin/cos signal transmission, slotless, brushless 3-phase torque motor
PIglide RL rotation stage, air bearing, 350 mm motion platform diameter, low height, absolute angle-measuring system with BiSS-C signal transmission, slotless, brushless 3-phase torque motor
Quickly receive an answer to your question by email or phone from a local PI sales engineer.

Multi-axis motion with nanometer precision and without friction.
Les entraînements directs magnétiques présentent des avantages par rapport aux technologies classiques basées sur des vis précontraintes ou à billes, notamment en termes d'usure et de dynamique.













